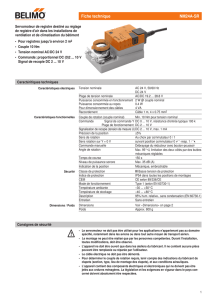
AC 01.2 Profibus DP

Informations générales
Commande de servomoteur AC 01.2 pour commander des servomoteurs multitours du type SA/SAR .2 et des servomoteurs fraction de tour du type
SQ/SQR avec interface Profi bus DP.
Equipement et fonctions
Alimentation Tensions standard:
Courant triphasé
Tensions/fréquences
Courant monophasé
Tensions/fréquences
Volt 380 400 415 440 460 480 500 Volt 110, 115,
120
220, 230,
240
Hz 50 50 50 60 60 60 50 Hz 60 50
Tensions spéciales:
Courant triphasé
Tensions/fréquences
Courant monophasé
Tensions/fréquences
Volt 525 575 660 690 Volt 208
Hz 50 50 50 50 Hz 60
Variations admissibles de la tension secteur : ±10 %
Variations admissibles de la tension secteur : ±30 % (optional)
Variations admissibles de la fréquence secteur: ±5 %
Alimentation externe de l’électronique
(option)
24 V DC + 20 %/– 15 %,
Consommation électrique : Version de base 250 mA env., avec options jusqu'à 500 mA
L'isolement contre la tension du réseau de l'alimentation externe doit être renforcé selon CEI 61010–1 et
l'alimentation externe ne doit être reliée qu'à un circuit limité à 150 VA selon CEI 61010–1.
Consommation électrique Consommation électrique de la commande en fonction de la tension du secteur:
pour une variation admissible de la tension de réseau ±10 % :
•100 à 120 V AC = maxi. 740 mA
•208 à 240 V AC = maxi. 400 mA
•380 à 500 V AC = maxi. 250 mA
•515 à 690 V AC = maxi. 200 mA
pour une variation admissible de la tension du secteur ±30 % :
•100 à 120 V AC = maxi. 1.200 mA
•208 à 240 V AC = maxi. 750 mA
•380 à 500 V AC = maxi. 400 mA
•515 à 690 V AC = maxi. 400 mA
Catégorie de surtension Catégorie III selon CEI 60364-4–443
Puissance assignée La commande est dimensionnée selon la puissance assignée du moteur, cf. Données électriques Servomoteurs
multitours/fraction de tour
Commande moteur Standard : Contacteurs inverseurs (verrouillés mécaniquement et électriquement) pour classes de puis-
sance AUMA A1/A2
Options : Contacteurs inverseurs (verrouillés mécaniquement et électriquement) pour classe de puis-
sance AUMA A3
Unité thyristor pour tensions d'alimentation jusqu'à 500 V AC (recommandée au service de
régulation) pour classes de puissance AUMA B1, B2 et B3
Les contacteurs inverseurs sont conçus pour une durée de vie maxi. de 2 millions de démarrages. Pour les
applications à un nombre de démarrages élevé, nous recommandons l’utilisation d’unités thyristors.
Affectation des classes de puissance AUMA, se référer aux données électriques Servomoteurs multitours/frac-
tion de tour
Commande et signaux de recopie Via interface Profi bus DP
Interface bus de terrain avec signaux
d'entrée supplémentaires (option)
•2 entrée libres analogiques (0/4 – 20 mA), 4 entrées libres numériques
- Transmission de signal via interface bus de terrain
•Entrées MODE, FERMETURE, OUVERTURE ARRET, URGENCE, interface E/S avec entrée 0/4 – 20 mA pour
valeur consigne de position
- Entrées de contrôle OUVERTURE, ARRET, FERMETURE, URGENCE
- Interface E/O pour sélectionner le type de contrôle (bus de terrain ou signaux d'entrée supplémen-
taires)
- MODE pour la sélection entre service TOR (OUVERTURE, ARRET, FERMETURE) et service modulation
(0/4 – 20 mA valeur consigne de position)
AC 01.2
Profi bus DP
Données techniques Commande de servomoteur
Nous nous réservons le droit de modifi er ces données qui dépendent des améliorations faites. Les anciennes fi ches perdent leur validité avec l'édition de celle-ci.
Y004.679/001/de Edition 1.14 Page 1/6

Des valeurs de tension et de courant
avec des entrées supplémentaires en
option
Standard : 24 V DC, consommation de courant : env. 10 mA par entrée
Options : 48 V DC, consommation de courant : env. 7 mA par entrée
60 V DC, consommation de courant : env. 9 mA par entrée
115 V DC, consommation de courant : env. 15 mA par entrée
115 V AC, consommation de courant : env. 15 mA par entrée
Tous les signaux d'entrée doivent être alimentés d'un même potentiel.
A chages d'état Via interface Profi bus DP
Interface bus de terrain avec signaux
de sortie supplémentaires (option)
Signaux de sortie supplémentaires (uniquement en combinaison avec signaux d'entrée supplémentaires)
Signaux de sortie binaires
•6 contacts de sortie programmables
- 5 contacts NO sans potentiel avec potentiel de référence commun, maxi. 250 V AC, 1 A (charge
résistive)
Confi guration standard : Position fi nale OUVERTE, position fi nale FERMEE, sélecteur DISTANCE,
défaut de couple FERMETURE, défaut de couple OUVERTURE
- 1 contacteur inverseur libre de potentiel maxi. 250 V AC, 5 A (charge résistive)
Confi guration standard : Signal de défauts collectifs (défaut de couple, perte de phase, protection
moteur déclenché)
•6 contacts de sortie programmables
- 5 contacts inverseurs sans potentiel avec potentiel de référence commun, maxi. 250 V AC, 1 A
(charge résistive)
- 1 contacteur inverseur libre de potentiel (maxi. 250 V AC, 5 A)
•6 contacts de sortie programmables
- 6 contacts inverseurs sans potentiel avec potentiel de référence commun, maxi. 250 V AC, 5 A
(charge résistive)
Tous les signaux de sortie binaires doivent être alimentés d'un même potentiel.
Signal de sortie analogique pour recopie de position
•Recopie de position à isolation galvanique 0/4 – 20 mA (charge maxi. 500 Ω).
Sortie de tension Standard : Tension auxiliaire 24 V DC, 100 mA maxi. pour alimenter les entrées de commande, isolation
galvanique par rapport à l’alimentation de tension interne
Option : Tension auxiliaire 115 V AC, 30 mA maxi. pour alimenter les entrées de commande, isolation
galvanique par rapport à l’alimentation de tension interne
Pas possible en combinaison avec dispositif de coupure par sonde PTC
Profi bus DP-V1 (option) Accès aux paramètres, à la plaque signalétique électronique et aux données d'opération et de diagnostic avec
services acycliques d'écriture et de lecture
Profi bus DP-V2 (option) Comportement de redondance selon spécifi cation Profi bus DP-V2 n° 2.212 de spécifi cation no. 2.212 (Primary
and Backup with RedCom [primaire et sauvegarde avec RedCom])
Synchronisation de l'heure entre l'AUMATIC et le maître Profi bus avec horodatage des évènements les plus
importants comme p.ex. défauts, messages de positions fi nales et de couple par l'AUMATIC
Redondance (option) Topologie de ligne redondante avec comportement de redondance universelle selon Redondance AUMA I et II
Topologie de ligne redondante avec comportement de redondance selon spécifi cation Profi bus DP-V2 n°
2.212 (Primary and Backup with RedCom [primaire et sauvegarde avec RedCom]), requiert Profi bus DP-V2
Connexion FO (option) •Types de câbles : Connecteur ST ou SC
•Câbles FO
- Multi-mode : 62,5(50)/125 µm, portée env. 2,5 km (maxi. 2,0 dB/km)
- Mono-mode : 9/125 µm, portée env. 15 km (max. 0,4 dB/km)
•Tolologies : Ligne, étoile et boucle redondante (avec interface Profi bus DP à un canal)
•Vitesse de transmission : jusqu'à 1,5 kbit/s
•Budget optique :
- Multi-mode : 13 dB
- Mono-mode : 17 dB
•Longueur d’onde : 1 310 nm
•Coupleur FO par EKS requis pour système contrôle-commande, source d'approvisionnement : AUMA ou
www.eks-engel.com
AC 01.2
Profi bus DP
Données techniques Commande de servomoteur
Y004.679/001/de Edition 1.14 Page 2/6
Nous nous réservons le droit de modifi er ces données qui dépendent des améliorations faites. Les anciennes fi ches perdent leur validité avec l'édition de celle-ci.

Commande locale Standard : •Sélecteur LOCAL – ARRET – DISTANCE (verrouillage possible aux trois positions)
•Boutons-poussoirs OUVERTURE, STOP, FERMETURE, RESET
- ARRET local
Le servomoteur ne peut pas être arrêté à l'aide de la commande locale lorsque le
sélecteur est en position DISTANCE. Ne pas activé lors du départ usine.
•6 voyants d'indication :
- Position fi nale et indication de course FERMEE (jaune), défaut de couple FERME
(rouge), déclenchement de la protection moteur (rouge) défaut de couple OUVERT
(rouge), position fi nale et indication de course OUVERTE (vert)
•A chage à cristaux liquides graphique, allumé
Option : •Couleurs spéciales pour les voyants d’indication:
- Position fi nale FERMEE (vert) défaut de couple FERME (bleu), défaut de couple
OUVERT (jaune), protection moteur déclenchée (violet), position fi nale FERMEE
(rouge)
Interface de communication
Bluetooth
Bluetooth classe II Chip, version 2.0 avec une portee jusqu'à 10 m en environnement industriel. Support du
profi l Bluetooth SPP (Serial Port Profi le).
Programme de paramétrage ;
AUMA CDT, outil de mise en service et de diagnostic pour PC, PDA et smartphones basés sur Windows
Fonctions d'utilisation Standard : •Type d’arrêt programmable
- sur fi n de course ou couple pour les positions fi nales OUVERTE et FERMEE
•By-pass de couple, réglable jusqu'à 5 secondes (sans surveillance de couple pendant le
temps de démarrage)
•Défi nition des points de fonctionnement du mode pas à pas/temps de marche/de pause (1
à 1 800 sec.) peuvent être programmés individuellement pour les directions OUVERTURE/
FERMETURE
•8 positions intermédiaires au choix entre 0 et 100 %. Possibilité de programmer la réac-
tion et le comportement de signalisation
•Positionneur :
- Valeur consigne de position à l'aide de l'interface bus de terrain
- Adaptation automatique de la bande morte (possibilité de sélection du comporte-
ment adaptatif)
- Commutation entre contrôle OUVERTURE-FERMETURE et contrôle de consigne via
bus de terrain
Option : •Contrôleur de procédé PID avec positionneur adaptif, entrées 0/4 – 20 mA pour valeur
consigne de procédé et valeur réelle de procédé
Fonctions en cas de panne •Manœuvre d'URGENCE, comportement programmable
- Entrée numérique low active (option) ou via interface bus de terrain
- Réaction au choix : Arrêt, manœuvre en direction de la position fi nale FERMEE, manœuvre en direc-
tion de la position fi nale OUVERTE, manœuvre à la position intermédiaire
- By-pass de la surveillance de couple possible lors d'une manœuvre d'URGENCE
- By-pass de la protection thermique possible lors d'une manœuvre d'URGENCE (uniquement en com-
binaison avec thermo-contact dans le servomoteur et non avec sonde PTC)
•Validation de la commande locale via interface bus de terrain. Ceci permet validation ou blocage de l'opé-
ration du servomoteur via commande locale
•ARRET local
- Le servomoteur ne peut pas être arrêté à l'aide de la commande locale lorsque le sélecteur est en
position DISTANCE. Ne pas activé lors du départ usine.
•Bouton d'arrêt d'URGENCE (à enclenchement) coupe le service électrique indépendamment de la position
du sélecteur
•Interlock, validation des commandes de manœuvre en direction OUVERTURE ou FERMETURE via interface
bus de terrain
Fonction de surveillance •Protection de la vanne contre surcouple (réglable), mène à l'arrêt et génère un signal de défaut
•Surveillance de la température du moteur (surveillance thermique), mène à l'arrêt et génère un signal de
défaut
•Surveillance de la résistance de chauffage dans le servomoteur génère un signal d’alarme
•Surveillance de la temps de marche admissible et la fréquence de démarrage (réglable), génère un signal
d'alarme
•Surveillance du temps de manœuvre (réglable), génère un signal d'alarme
•Surveillance de la perte des phases, mène à l'arrêt et génère un signal de défaut
•Correction automatique du sens de rotation lors d'une séquence de phases incorrecte (réseau triphasé)
AC 01.2
Profi bus DP
Données techniques Commande de servomoteur
Nous nous réservons le droit de modifi er ces données qui dépendent des améliorations faites. Les anciennes fi ches perdent leur validité avec l'édition de celle-ci.
Y004.679/001/de Edition 1.14 Page 3/6

Fonction de diagnostique •Identifi cation de l'appareil électronique avec données de commande et de produit
•Enregistrement des données de service : Respectivement, un compteur avec remise à zéro et un compteur
durée de vie pour:
- temps de marche du moteur, nombre de cycles, arrêts sur limiteur de couple en position fi nale
FERMEE, arrêts sur fi n de course en position fi nale FERMEE, arrêts sur limiteur de couple en position
fi nale OUVERTE, arrêts sur fi n de course en position fi nale OUVERTE, défaut de couple en FERME-
TURE, défaut de couple en OUVERTURE, déclenchements disjoncteur pour protection du moteur
•Protocole d'évènements incluant horodatage avec chronologie des évènements de réglage, d'opération
et de défaut :
- A chages d'état selon la recommandation NAMUR NE 107 : " Défaillance ", " Contrôle fonction ", "
Hors spécifi cation ",
" Maintenance requise "
•Caractéristiques de couple (version avec MWG dans le servomoteur)
- 3 caractéristiques de couple (caractéristique couple-course) à mémoriser séparément pour les direc-
tions OUVERTURE et FERMETURE. Les caractéristiques de couple mémorisées peuvent être a chées
à l'écran,
Evaluation de la protection du moteur Standard : •Surveillance de la température du moteur en combinaison avec les thermo-contacts dans
le moteur du servomoteur
Options : •Relais de surcharge thermique dans le servomoteur, en combinaison avec des thermo-
contacts dans le servomoteur
•Dispositif de coupure pour sonde PTC en combinaison avec des sondes PTC dans le
moteur du servomoteur
Protection surcharge (option) Protection de l’électronique du servomoteur et de la commande de surtensions sur les lignes de bus de terrain
jusqu’à 4 kV
Raccordement électrique Standard : Multiconnecteur AUMA avec bornes à vis
Options : •Bornes ou connexion à sertissage
•Fiches contrôle-commande plaquées or (mâle et femelle)
Taraudages pour entrées de câbles Standard : Taraudages métriques
Options : Taraudages Pg, taraudages NPT, taraudages G
Schéma de câblage (version de base) TPCAA000-1A1-A000 TPA00R1AA-0A1-000
En supplément pour version avec MWG dans le servomoteur
Réglages du contact fi n de course et du limiteur de couple via commande locale
Recopie de couple Via Profi bus DP
Sortie analogique à isolation galvanique 0/4 – 20 mA (charge maxi. 500 Ω). Option uniquement possible en
combinaison avec contacts de sortie
Schéma de câblage (version de base) TPCAA000-1A1-A000 TPA00R100-0I1-000
Réglage/programmation de l’interface Profi bus DP
Régler la vitesse de transmission Détection automatique de la vitesse de transmission
Réglage de l’interface Profi bus DP Le réglage de l’adresse de Profi bus DP se fait par l’intermédiaire de l’écran d'a chage de l'AC 01.2
Représentation de processus program-
mable via fi chier GSD
Pour une adaptation optimum au système de contrôle commande, la représentation de processus d'entrée
(signaux de recopie) peut être confi gurée selon besoin.
Consignes et signalisations de l’interface Profi bus DP
Représentation du processus de sortie
(commandes de manœuvre)
OUVERTURE, ARRET, FERMETURE, consigne de position, RAZ, commande de manœuvre URGENCE, déver-
rouillage de la commande locale, Interlock OUVERTURE/FERMETURE
Représentation du processus d’entrée
(signaux de recopie)
Position fi nale OUVERTE, FERMEE
Valeur de position réelle
Valeur de couple réelle, transmetteur magnétique de position et de couple (MWG) requis dans le servomoteur
Sélecteur en position LOCAL/DISTANCE
Indication de marche (dépendante de la direction)
Limiteur de couple OUVERT, FERME
Contact fi n de course OUVERT, FERME
Opération manuelle à l’aide du volant ou la commande locale
Entrées de client analogiques (2) et numériques (4)
AC 01.2
Profi bus DP
Données techniques Commande de servomoteur
Y004.679/001/de Edition 1.14 Page 4/6
Nous nous réservons le droit de modifi er ces données qui dépendent des améliorations faites. Les anciennes fi ches perdent leur validité avec l'édition de celle-ci.

Représentation du processus d’entrée
(signaux de défaut)
Protection moteur déclenchée
Contact de couple déclenché avant que la position fi nale soit atteinte
Perte d’une phase
Perte de communication des entrées client analogiques
Comportement lors de la perte de
communication
Il est possible de programmer la réaction du servomoteur :
•Arrêt en position actuelle
•Manœuvre en positions fi nales FERMEE ou OUVERTE
•Effectuer une manœuvre à toute position intermédiaire
•Effectuer la dernière commande de manœuvre réceptionnée
Données générales Profi bus DP
Protocole de communication Profi bus DP selon CEI 61158 et CEI 61784
Topologie du réseau Structure linéaire (bus de terrain) Il est possible de réaliser des structures arborescentes en utilisant des
répéteurs. Pendant le fonctionnement, des appareils peuvent être connectés ou déconnectés sans affecter les
autres adresses.
Milieu de propagation Conducteur en cuivre torsadé et blindé selon CEI 61158
Interface Profi bus DP EIA-485 (RS-485)
Vitesse de transmission/longueur de
câble Vitesse de communication
(kbit/s)
Longueur maxi. de câble
(longueur de segment) sans
répéteur
longueur de câble possible
avec répéteurs (longueur de
réseau total) :
9,6 – 93,75
187,5
500
1 500
1 200 m
1 000 m
400 m
200 m
Env. 10 km
Env. 10 km
Env. 4 km
Env. 2 km
Gerätetypen Maître DP catégorie 1
Maître DP catégorie 2, p.ex. des appareils de programmation/de projection.
Esclave DP, p.ex. appareils à entrées et sorties numériques et/ou analogiques, comme des actionneurs, des
capteurs
Nombre d’appareils 32 appareils sans répéteur, avec répéteur extensible jusqu’à 126 appareils
Accès bus de terrain Passage de jeton entre les maîtres et interrogation de terminaux pour les esclaves. Des systèmes mono-
maîtres ou multi-maîtres sont possibles.
Fonctions Profi bus DP soutenues Echange de données, mode sync, mode freeze, mode fail-safe
Profi bus DP n° d'identifi cation 0x0C4F : Application standard avec Profi bus DP-V0 et DP-V1
0x0CBD : Applications avec Profi bus DP-V2
Conditions de service
Utilisation Utilisation permise à l'intérieur et à l'extérieur
Position de montage Selon choix
Niveau d’installation ≤ 2 000 m au-dessus du niveau de la mer
> 2 000 m au-dessus du niveau de la mer, sur demande
Température ambiante Standard : –25 °C à +70 °C
Options : –60 °C à +60 °C, version température extrêmement basse
Version de basse température incluant un système de chauffage destiné à la connexion à une
alimentation externe de 230 V AC ou 115 V AC.
Humidité Jusqu'à 100 % d'humidité relative sur toute la plage de température admissible
Indice de protection selon EN 60529 Standard : IP68 avec moteur triphasé/monophasé AUMA
Indice de protection divergent pour moteurs spéciaux : cf. plaque signalétique
Option : Boîte de raccordement DS (double sealed) à double seuil d'étanchéité interne externe
Selon la défi nition AUMA, l'indice de protection IP68 satisfait aux exigences suivantes :
•Profondeur d'eau : 8 m maxi. de hauteur de colonne d'eau
•Durée de l'immersion prolongée dans l'eau : 96 heures maxi.
•10 opérations maximum en immersion prolongée
Le service régulation n'est pas possible en immersion prolongée.
AC 01.2
Profi bus DP
Données techniques Commande de servomoteur
Nous nous réservons le droit de modifi er ces données qui dépendent des améliorations faites. Les anciennes fi ches perdent leur validité avec l'édition de celle-ci.
Y004.679/001/de Edition 1.14 Page 5/6
 6
6
1
/
6
100%