mesure position vitesse

Mesure de position et de vitesse.
Contrairement aux capteurs vue dans le chapitre précédent on recherche ici une
information analogique ou numérique image de la position de l'objet à contrôler.
1) Capteur potentiométrique de distance
On utilise une résistance fixe bobinée ou une piste conductrice. Un curseur est lié
mécaniquement à la pièce en déplacement et est placé en contact avec cette résistance.
On mesure alors la tension sur le curseur.
!"#$%#&"'$#($)($*&*#&+),-.
*/012)03)4156/)7816895:;</)=/)03)58>:>932?/)4:@/)/9)=12?)
=<)61<A/6/29)=<)?<5>/<5B)12)=:>9:27</)C)
DE)0/)F19/29:16G95/)=/)=8F03?/6/29)5/?9:0:72/
-E)0/)F19/29:16G95/)=/)=8F03?/6/29)?:5?<03:5/
HI/23J00/)#"KL'&%$#)M)3>:)M)-NN-O-NNP
$?<5>/<5
Q
R
=
!!"#
"$"##"#
%!"#
"$
%!
$#
&
$$
&
%!#
$
%
!!%
%'
%
On peut aussi utiliser un potentiomètre angulaire on a alors la relation :
!"#$%#&"'$#($)($*&*#&+),-.
*/012)03)4156/)7816895:;</)=/)03)58>:>932?/)4:@/)/9)=12?)
=<)61<A/6/29)=<)?<5>/<5B)12)=:>9:27</)C)
DE)0/)F19/29:16G95/)=/)=8F03?/6/29)5/?9:0:72/
-E)0/)F19/29:16G95/)=/)=8F03?/6/29)?:5?<03:5/
HI/23J00/)#"KL'&%$#)M)3>:)M)-NN-O-NNP
$?<5>/<5
Q
R
=
!!"#
"$"##"#
%!"#
"$
%!
$#
&
$$
&
%!#
$
%
!!%
%'
%
Produits 2004/2005 – Sous réserve de modifications – 2003/10
5/1.2-2
Systèmes de mesure
Caractéristiques
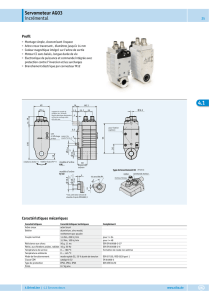
Systèmes de mesure analogiques
MLO-POT-…-TLF
!Potentiomètre à plastique
conducteur
!Mesure absolue à haute résolution
!Vitesse de traitement élevée,
longue durée de vie
!Diverses possibilités de fixation
aux vérins linéaires pneumatiques
DGPL
!Connecteurs enfichables
!Course : 225 … 2 000 mm
MLO-POT-…-LWG
!Potentiomètre à tige
!Mesure absolue à haute résolution
!Longue durée de vie
!Degré de protection élevé
!Connecteurs enfichables
!Course : 100 … 750 mm
Systèmes de mesure numériques
MME-MTS-…-AIF
!Principe de mesure magnétostrictif
!Sans contact et à mesures absolues
!Vitesse de traitement élevée
!Longue durée de vie
!Degré de protection élevé
!Diverses possibilités de fixation
aux vérins linéaires pneumatiques
DGPL
!Connecteurs enfichables
!Course : 225 … 2 000 mm
Systèmes de positionnement servopneumatiques
Systèmes de mesure
1.2
Avantages : - simplicité - peu coûteux - angle de mesure 10° à 3600° - la sortie est
indépendant R => stable par rapport à la température
Inconvénients :
- charge mécanique
- usure par frottements
- influence de la source
- influence de l'appareil de mesure. solution : amplificateur suiveur
pour garantir la validité de l'utilisation du diviseur de tension
2) Capteur inductif de déplacement
Principe
Le déplacement que l'on veut mesurer est imposé à un des éléments d'un circuit
magnétique entraînant une variation de flux.
Linear Variable Differential Transformer (LVDT)
Mesure de position et de vitesse.! ! ! ! ! ! ! Page 1/7

Capteur de déplacement inductif utilisant le principe de variation de flux dus au
mouvement du noyau.
Le primaire est attaqué par un signal
sinusoïdal.
Un signal sinusoïdal est induit dans les 2
bobines du secondaire.
Quand le noyau est au milieu du
transformateur, on a Vs =0, car les tensions
induites dans les
deux bobines sont d'amplitudes égales mais
de sens opposé.
Comme Fonctionne-T-il - C.C.
LVDT
3)Capteurs à ultrason
Principe : Émission et réception d'une onde acoustique.
La distance entre l'émetteur et l'obstacle est donnée par le temps de vol de l'onde
acoustique.
v : vitesse de l'onde
dans le milieu
T : temps entre
l'émission et la
réception de l'onde
Avantages!
- ne dépend pas du matériau en déplacement!
- E.M jusqu'à une dizaine de m
Inconvénients
- E.M à partir du cm!
- dépend de l'angle de réflexion
!""#$$!"% $&'% ((()*+,-)./0&1*&+.23),+1
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
45,-% 6700-% 8**-9*%+-%:;<=7*;2=%
>?%@)8)A% B% C% D'% @/;+E%
2/27:% 4F%
G/579%
./0,:H2-0-<2%
*-<2*=%
G/579%
./0,:H2-0-<2%
E/*2;-%
DI4JK""I% L$!MK00% NL"MK&L"M!K&L"M$% $OP00 'Q00 PM#K00 'P"R% $K00 $"00% $!00%
DI4J$"""I% L!K00% NL"MK&L"M!K&L"M$% !!!00 S'00 PM#K00 'OQR% $K00 $'00% $"00%
DI4J!"""I% LK"00% NL"MK&L"M!K&L"M$% ''S00 #S00 PM#K00 K$$R% $K00 $"00% $P00%
DI4J'"""I% L#K00% NL"MK&L"M!K&L"M$% PPQ00 $$P00 PM#K00 S!KR% $K00 !P00% $K00%
DI4JP"""I% L$""00% NL"MK&L"M!K&L"M$% POP00 $!#00 PM#K00 #S#R% $K00 Q00% $P00%
DI4JS"""I% L$K"00% NL"MK&L"M!K% SQP00 $#Q00 PM#K00 $M"TR $K00 $!00% $#00%
DI4JQ"""I% L!""00% NL"MK&L"M!K% Q#K00 !KP00 PM#K00 $MPTR '!00 !!00% !K00%
DI4J$""""I% L!K"00% NL"MK&L"M!K% $"S#00 '"K00 PM#K00 $M#TR !#00 'P00% 'K00%
DI4J$K"""I% L'#K00% NL"MK% $P#'00 P"S00 PM#K00 !M!TR $O00 $'00% $'00%
DI4J$QK""I% LP#"00% NL"MK% $#P"00 K"Q00 SM""00 !MSTR !#00 K00% ''00%
%
%%
DÉPLACEMENT
DCTH Capteur De Déplacement à électronique Intégré
Ɣ% 6*7<+-%+9*=-%+-%U;-%
Ɣ% V.;-*%;</W%
Ɣ% 6*7<+-%,*=.;E;/<%
Ɣ% J792-%*=E/:92;/<%
Ɣ% X/*2;-%2-<E;/<%&%PY!"0V%
%%%
%%%
%%%
%
I-E%.7,2-9*E%E/<2%,/9*%+-E%0-E9*-E%+-%,/E;2;/<%&%+=,:7.-0-<2)%Z:E%1/<2%9<-%0-E9*-%,*=.;E-%+-%:7%,/E;2;/<%-2%
+9%0/9U-0-<2%+9%</579%>%,7*2;-%0/[;:-A%,7*%*7,,/*2%79%./*,E%+9%.7,2-9*)%
%
I-%.7,2-9*%92;:;E-%:-%,*;<.;,-%+9%2*7<E1/*072-9*%+;11=*-<2;-:%\9;%-E2%,*/[7[:-0-<2%:-%,:9E%E;0,:-%-2%:-%,:9E%
*/[9E2-%.7,2-9*%+-%,/E;2;/<%+;E,/<;[:-)%B7%E9,=*;/*;2=%+9%,*;<.;,-%+9%B)])D)4M%-E2%\9^;:%<^5%7%,7E%+-%./<27.2%
=:-.2*;\9-%7U-.%:^=:=0-<2%E-<E;[:-M%.-%\9;%E;R<;1;-%,/9*%:^92;:;E72-9*M%+-E%+/<<=-E%.:7;*-EM%9<-%*=E/:92;/<%;<1;<;-%
-2%9<-%2*HE%:/<R9-%+9*=-%+-%U;-)%
%
G/E%.7,2-9*E%B)])D)4%_%=:-.2*/<;\9-E%;<2=R*=E%/11*-%2/9E%:-E%[=<=1;.-E%+9%,*;<.;,-%+-E%.7,2-9*E%B)])D)4M%7U-.%
:^7U7<27R-%+-%:^7:;0-<272;/<%./<2;<9-%-2%+-%:7%E/*2;-%7<7:/R;\9-%-<%2-<E;/<)%8<%/,2;/<%</9E%,/9U/<E%1/9*<;*%E9*%
.-*27;<%0/+=:-%9<-%./<<-.2;/<%PY!"0V%!%1;:E)%
%
B-E%.7,2-9*E%E/<2%+;E,/<;[:-E%-<%U-*E;/<%</579%:;[*-M%</579%R9;+=%/9%,7:,-9*%_%*-EE/*2%+-%*7,,-:)%
]-*E;/<%</579%.7,2;1%R9;+=)% G/E%.7,2-9*E%+-%+=,:7.-0-<2%_%</579%
R9;+=%.7,2;1%,/EEH+-<2%9<%*/9:-0-<2%
,/9*%R9;+=%:`7*0729*-%_%:`;<2=*;-9*-%+9%
.7,2-9*)%B-E%B]D4%_%</579%R9;+=%E/<2%
,/9*%:-E%7,,:;.72;/<E%+-%0-E9*-%+-%
,/E;2;/<%/a%:-%R9;+7R-%-E2%17;[:-%-2%
<=.-EE;2-%+-E%*/29:-E)%
B% C
!"MS00%
!'00%
D'% bKW"MQ%
4F
" c
Y
bKW"MQ%&%$$00%
!"#$%&'()&*$'"(+,+'%()-./
012345662)$+&*78,%$)9)4:;)9)<==<><==?
#@;3A;B2)C
DE;::;F3)2G)@HA2BG;F3)IJK32)F3I2)4AFK:G;LK2M
*4)I;:G43A2)23G@2)6JHE2GG2K@)2G)6JFN:G4A62)2:G)IF33H2)B4@)62)
G2EB:)I2)OF6)I2)6JF3I2)4AFK:G;LK2M)
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!!" # !"# "
$
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
O)C)O;G2::2)I2)6JF3I2)I43:)62)E;6;2K)
$)C)G2EB:)23G@2)6JHE;::;F3)2G)64)
@HA2BG;F3)I2)6JF3I2
"O43G4R2:
>)32)IHB23I)B4:)IK)E4GH@;4K)23)IHB64A2E23G
83AF3OH3;23G:
>)%M7)S)B4@G;@)IK)AE
>)%M7)QK:LKJS)K32)I;T4;32)I2)E >)IHB23I)I2)6J43R62)I2)@HU62V;F3
!"#$%&'()&*$'"(+,+'%()-./
012345662)$+&*78,%$)9)4:;)9)<==<><==?
#@;3A;B2)C
DE;::;F3)2G)@HA2BG;F3)IJK32)F3I2)4AFK:G;LK2M
*4)I;:G43A2)23G@2)6JHE2GG2K@)2G)6JFN:G4A62)2:G)IF33H2)B4@)62)
G2EB:)I2)OF6)I2)6JF3I2)4AFK:G;LK2M)
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!!" # !"# "
$
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
!;@AK;G)I2)AF3G@P62 +NQ2G
I
@HA2BG2K@
HE2GG2K@
!
O)C)O;G2::2)I2)6JF3I2)I43:)62)E;6;2K)
$)C)G2EB:)23G@2)6JHE;::;F3)2G)64)
@HA2BG;F3)I2)6JF3I2
"O43G4R2:
>)32)IHB23I)B4:)IK)E4GH@;4K)23)IHB64A2E23G
83AF3OH3;23G:
>)%M7)S)B4@G;@)IK)AE
>)%M7)QK:LKJS)K32)I;T4;32)I2)E >)IHB23I)I2)6J43R62)I2)@HU62V;F3
Mesure de position et de vitesse.! ! ! ! ! ! ! Page 2/7
!"#$%&'()*+,&!$*-()./0
#1234256
76)895:;46<63=)>?6):@A3)B6?=)<6C?161)6C=)2<5AC9)D)?3)86C)9:9<63=C)
8@?3)4214?2=)<;E39=2>?6)63=1;F3;3=)?36)B;12;=2A3)86)G:?HI
;I)7236;1)J;12;K:6),2GG6163=2;:)$1;3CGA1<61).7J,$0
!;5=6?1)86)895:;46<63=)238?4=2G)?=2:2C;3=):6)51234256)86)B;12;=2A3)86)
G:?H)8?C);?)<A?B6<63=)8?)3AL;?I
))))))))))))))))))))))))))))))76)512<;216)6C=);==;>?9)5;1)?3)C2E3;:)C23?CAM8;:I
))))))))))))))))))))))))))))))&3)C2E3;:)C23?CAM8;:)6C=)238?2=)8;3C):6C)N)KAK236C)))
))))))))))))))))))))))))))))))8?)C64A38;216I
))))))))))))))))))))))))))))))O?;38):6)3AL;?)6C=);?)<2:26?)8?)=1;3CGA1<;=6?1P)))))
))))))))))))))))))))))))))))))A3);)JC)QRP)4;1):6C)=63C2A3C)238?2=6C)8;3C):6C))))))))))
))))))))))))))))))))))))))))))86?H)KAK236C)CA3=)8@;<5:2=?86C)9E;:6C)<;2C)86)))))))
))))))))))))))))))))))))))))))C63C)A55AC9I
ST63;U::6)$V&7W*+%$)X);C2)X)NRRNYNRRZ
I
I
512<;216 C64A38;216
3AL;?
J16G JC

!"#$%&'()&*$'"(+,+'%()-./
012345662)$+&*78,%$)9)4:;)9).<<.=.<<>
?@2AA2BC=C2D2EA2BC +F:A4D62
GHC6HI2
!H@EA4I2)J2:);@EB6:;H3:)JKLHC6HI2)MDHB6M ,NO
*4)@2:BC2)JME23J)J2)P
=)6K4@E6;ABJ2)J2)6KMDLH
=)J2)6K43I62)JK;3D;J23D2)JB)Q4;:D24B):BC)6KHFR2A
*4)ECMD;:;H3)J2)64)@2:BC2)JME23J)J2)P
=)6KLHC6HI2)BA;6;:M)EHBC)62)DH@EA4I2
=)64)D4E4D;AM)JB):S:AT@2)M62DACH3;UB2)V)JMA2DA2C)6KMDLH
*4)ECMD;:;H3)E2BA)WAC2)@2;662BC2)UB2)<XY)@@
Y.
La mesure dépend de :
- l'amplitude de l'écho
- de l'angle d'incidence du faisceau sur l'objet
La précision de la mesure dépend de :
- l'horloge utilisé pour le comptage
- la capacité du système électronique à détecter l'écho
- La précision peut être meilleure que 0.1 mm
4)Capteurs optique
principe Émission et réception d'un faisceau optique et mesure de distance suivant un
principe de triangulation optique.La lumière réfléchie est focalisée sur la surface du
capteur (Position Sensitive Détector). Le capteur délivre alors un courant Ia et Ib
proportionnel à la distance x du point d'impact du faisceau au milieu du capteur.
!"#$%&'()*#$+,&%()-./
012345662)$*&78+9%$):)4;<):)=>>=?=>>@
#A<3B<C2
DE<;;<F3)2G)AHB2CG<F3)IJK3)L4<;B24K)FCG<MK2)2G)E2;KA2)I2)
I<;G43B2);K<N43G)K3)CA<3B<C2)I2)GA<43OK64G<F3)FCG<MK2
72I
#F;<G<F3);23;<G<N2)I2G2BGFA
+4
+P
723G<662;
74)6KE<QA2)AHL6HBR<2)2;G)LFB46<;H2);KA)64);KAL4B2)IK)B4CG2KA)#(ST)
72) B4CG2KA) IH6<NA2) 46FA;) K3) BFKA43G) +4) 2G) +P)CAFCFAG<F3326) U) 64)
I<;G43B2)V)IK)CF<3G)IJ<EC4BG)IK)L4<;B24K)4K)E<6<2K)IK)B4CG2KAT
V
7F
7P
L
!!" !"!#
$
!"#$%&'()*#$+,&%()-./
012345662)$*&78+9%$):)4;<):)=>>=?=>>@
#A<3B<C2
DE<;;<F3)2G)AHB2CG<F3)IJK3)L4<;B24K)FCG<MK2)2G)E2;KA2)I2)
I<;G43B2);K<N43G)K3)CA<3B<C2)I2)GA<43OK64G<F3)FCG<MK2
72I
#F;<G<F3);23;<G<N2)I2G2BGFA
+4
+P
723G<662;
74)6KE<QA2)AHL6HBR<2)2;G)LFB46<;H2);KA)64);KAL4B2)IK)B4CG2KA)#(ST)
72) B4CG2KA) IH6<NA2) 46FA;) K3) BFKA43G) +4) 2G) +P)CAFCFAG<F3326) U) 64)
I<;G43B2)V)IK)CF<3G)IJ<EC4BG)IK)L4<;B24K)4K)E<6<2K)IK)B4CG2KAT
V
7F
7P
L
!!" !"!#
$
Avantages
- très bonne résolution!
Inconvénients
- dépend de la réflectivité du matériau ciblé.
Il existe également des capteurs fonctionnant sur la mesure du temp de vol d'un signal
laser
Subject to reasonable modifications due to technical advances. Copyright Pepperl+Fuchs, Printed in Germany
Pepperl+Fuchs Group • Tel.: Germany (06 21) 7 76-0 • USA (330) 4 25 35 55 • Singapore 7 79 90 91 • Internet http://www.pepperl-fuchs.com
3
Technische DatenTechnical data
Features
Electrical connection
Dimensions
• Extremly small unusable area - only
15 mm
•Current and voltage output
• 12 bit D/A transducer
• Evaluation limits can be taught-in
• Temperature compensation
• Compact construction
• Plug connection
General specifications
Sensing range 15 ... 300 mm
Standard target plate 100 mm x 100 mm
Unusable area 0 ... 15 mm
Transducer frequency approx. 380 kHz
Response delay ! 35 ms
Standard conformity EN 60947-5-2
Indicating/Operating means
LED yellow permanently yellow: object in the evaluation range
yellow, flashing: Teach-in function evaluation limits, slope
LED red/green permanent green: Power on green, flashing: TEACH-IN function,
object detected permanently red: Connector removed red, flashing:
Error, teach-in function object not detected
Temperature/TEACH-IN connector Temperature compensation, TEACH-IN of the switch points, output
function change over
Electrical specifications
Rated operational voltage Ue10 ... 30 V DC, ripple 10 %SS
Power consumption P0! 800 mW
Output
Output type 1 current output 4 ... 20 mA
1 voltage output 0 ... 10 V
Repeat accuracy ! 0.1 % of final value
Resolution 0.172 mm
Deviation of the characteristic
curve
! 0.2 % of final value
Load impedance current output: ! 500 Ohm
Voltage output: " 1000 Ohm
Temperature influence < 2 % of full-scale value
(! 0.2 % / K without temperature compensation)
Ambient conditions
Ambient temperature 0 ... +50 °C (273 ... 323 K)
Storage temperature -40 ... +85 °C (233 ... 358 K)
Mechanical specifications
Protection degree IP65 according to EN 60529
Connection type V1 connector (M12 x 1), 4 pin
Material
Housing high grade steel (stainless)
Transducer epoxy resin/hollow glass sphere mixture; foam polyurethane, cover
PBT
Mass 175 g
Standard symbol/Connection:
+ UB
- UB
1
4
2
3
U
0-10 V
4-20 mA
Temperature probe
Coded plug
M30x1.5
22
114
5
27.5
36
LED
Single head system
UC300-30GM-IU-V1
17.08.2001 044828_e
Mesure de position et de vitesse.! ! ! ! ! ! ! Page 3/7

5)Génératrice tachymétrique
Elles délivrent une tension proportionnelle à la vitesse de rotation du moteur auquel elle
est couplée. Il en existe de deux sortes
51) Génératrice a courant continu
L'excitation est assurée par des
aimants permanents.
U = E - r.I et U = Rc.I (Rc est la
résistance de charge)
d'où: U = E / (1+r/Rc) = Ke.W / (1+r/
Rc) = K.W"
avec Ke: constante de f.e.m. en v/rd/
s et W : pulsation en rd/s
La caractéristique tension-vitesse est
donc linéaire.
52) Génératrice a courant alternatif
E et Z sont les
f.e.m. et impédance
par phase.
V = E - Z . I et V =
Rc . I (Rc résistance
de charge par
phase)
d'où: V = E / (1 + Z /
Rc)
Z est fonction de la
pulsation des
grandeurs
électriques, donc
dépend de la
vitesse de rotation
de la génératrice: la
caractéristique tension-vitesse n'est plus linéaire
Caractéristiques principales:
- vitesse maximale de rotation (en tours par minute),
- constante de f.e.m. (en volts à 1000 trs/mn ou en v/tr/mn),
- linéarité (en %),
- ondulation crête à crête (en %),
- courant maximal.
Pour atténuer l'ondulation sur la tension de sortie, un filtrage peut s'avérer nécessaire:
Mesure de position et de vitesse.! ! ! ! ! ! ! Page 4/7

La fréquence de coupure du filtre passe-bas est donnée par: fc = 1/(2.π.R.C).
6) Codeur incrémental
Lorsque le déroulement de mouvements mécaniques doit être surveillé, le codeur est
le lien le plus important entre la mécanique et la commande. Le codeur, que l'on
appelle aussi capteur de pas angulaire, transforme un mouvement rotatif en un signal
électrique exploitable. Pour ce faire, un disque d'impulsions a été doté d'un nombre
déterminé de segments clair/sombre qui sont palpés par un rayon lumineux. Le
nombre de segments détermine la résolution possible et par là, la précision de
positionnement du mouvement à contrôler. Avec deux signaux déphasés chacun de 90
degrés, il est possible de déterminer le sens de rotation et, en plus, pour chaque
rotation, on dispose d'un signal de référence pour la position zéro.
Un codeur incrémental possède généralement plusieurs voies:
- voie Z donnant une impulsion par tour,
- voie A donnant n impulsions par tour,
- voie B identique à voie A, mais dont les signaux sont déphasés de + ou -
90°, suivant le sens de rotation.
La simple utilisation d'une bascule D permet d'obtenir une information logique
concernant le sens de rotation:
Mesure de position et de vitesse.! ! ! ! ! ! ! Page 5/7
 6
7
6
7
1
/
7
100%