Modélisation électrique - Etud.insa

Institut National des Sciences Appliquées de Toulouse
Rapport de TP
Modélisation électrique
de la commande de charge dans l’automobile
Simon Bouvot <[email protected]>
Alexis Ferte <[email protected]>
Encadrant : Romain Montheard
Résumé
Ce présent document mêle différentes méthodes de conception permettant de réaliser la
commande d’un moteur en garantissant son fonctionnement, la protection des composants,
une consommation minimale ainsi que le filtrage du signal. Ce projet a été réalisé grâce à
différents modèles et simulations sur LTSpice IV avec l’aide de Romain Montheard.

Table des matières
1 Modélisation électrique 3
1.1 Modèledumoteur ........................................ 3
1.2 Pilotage du moteur par un MOSFET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Résistance à l’état passant du MOSFET . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Pilotage du montage par une MLI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Limitationducourant .................................. 5
1.3.2 Formes d’onde aux bornes du MOSFET . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.3 MiseenplacedelaMLI................................. 7
1.4 Alimentation unique par batterie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.1 Puissances dissipées par le MOSFET . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.2 Pompedecharge..................................... 8
1.4.3 Ajoutd’unbootstrap .................................. 11
1.5 Implémentation d’un modèle de ligne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5.1 FiltreenPi ........................................ 14
1.5.2 Protection contre les surtensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.3 Protection contre les sous-tensions . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6 Modèlecomportemental ..................................... 16
1.6.1 Abased’équation .................................... 16
1.6.2 Modélisationdumoteur ................................. 16
2

Chapitre 1
Modélisation électrique
1.1 Modèle du moteur
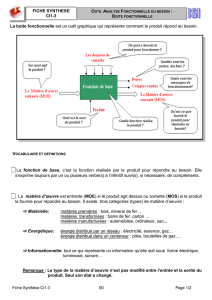
On modélise le moteur à courant continu grâce à une résistance (représentant à la fois la puissance
utile et les pertes), une inductance et une diode de roue libre avec les caractéristiques suivantes :
R= 0.4Ω L= 0.1mH
Figure 1.1 – Modélisation du moteur à courant continu
On a une tension batterie de Vdd = 12V, il va falloir dimensionner la diode de roue libre de manière à
ce que le courant dans la résistance soit égal au courant direct moyen parcouru dans celle-ci. On a :
Id=Vdd
R=12
0.4= 30A
On choisit une diode Schottky (MBRB2545CT) avec un courant direct IDM AX = 25A.
Remarque : C’est la diode disposant du plus grand IDM AX dans LTSPICE.
1.2 Pilotage du moteur par un MOSFET
Le moteur à courant continu est piloté par un MOSFET de puissance pouvant supporter une surtension
à ses bornes de 40V avec un QGtypique de 40nC.
3

Modélisation électrique INSA Toulouse
1.2.1 Résistance à l’état passant du MOSFET
Avant de piloter notre moteur avec un MOSFET, on doit dimensionner la résistance à l’état passant
de ce dernier en fonction de la charge à piloter. On a :
RthJ C = 15oC/W Tmax = 150oCRON150oC
RON25oC
= 1.7
Pour déterminer la valeur de la résistance, on passe par la puissance maximale dissipable dans le
MOSFET (qui est d’ailleurs un NMOS), on aura ensuite nos 2 valeurs de résistance pour les 2 températures
150oCet 25oC.
PMOSmax =Tmax
RthJ C
=150oC
15oC/W = 10W
Résistance à 150oC
RON150oC=Pmax
I2
max
=10
302= 11.11mΩ
Résistance à 25oC
RON25oC=RON150oC
1.7= 6.54mΩ
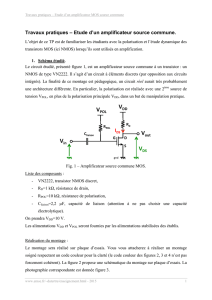
En étudiant la bibliothèque de LTSPICE, on choisi donc le NMOS de puissance STD95N04 qui a les
caractéristiques suivantes :
Vds = 40V RdsON = 5.4mΩQgate = 40nC
Figure 1.2 – Pilotage du moteur par un NMOS
1.3 Pilotage du montage par une MLI
On veut contrôler le montage charge et MOSFET de puissance par une MLI disposant des caractéris-
tiques suivantes :
fMLI = 20kHz η = 50%
Bouvot - Ferte Page 4/ 18 29 janvier 2014

Modélisation électrique INSA Toulouse
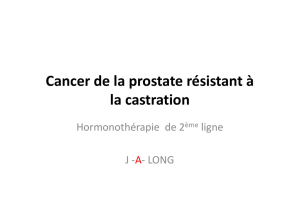
1.3.1 Limitation du courant
Le courant maximal de grille du NMOS doit être de 100mA. On dimensionne donc Rgrille à :
Rgrille =Vdd
Imax
=12
0.1Rgrille = 120Ω
Figure 1.3 – NMOS piloté par une MLI
1.3.2 Formes d’onde aux bornes du MOSFET
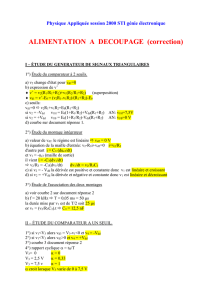
On visualise les formes d’onde aux bornes du MOSFET. Tout d’abord la puissance dissipée dans le
MOS et ensuite VGS puis VDS .
Puissance dissipée dans le MOS
La puissance est calculée avec la formule suivante : (V(vdd)−V(vsource)) ∗Id(M1).
Figure 1.4 – Puissance dissipée dans le MOS : alimentation de 12V
On remarque que la puissance dissipée est de 40W pour une alimentation de 12V. Cependant, la
puissance maximale dissipée dans le MOS est de PMOSmax = 10W. On vérifie cette valeur de puissance
pour une alimentation 2 fois plus grande (24V).
Bouvot - Ferte Page 5/ 18 29 janvier 2014
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%