ELECTRONIQUE ANALOGIQUE

Electronique Analogique 2011 - 2012
EISTI
Guy Almouzni
ELECTRONIQUE
ANALOGIQUE

Electronique Analogique 0. Préambule
0.
0. Préambule
ELECTRONIQUE ANALOGIQUE
Plan du cours
1. Théorèmes généraux
(Cours + TD + TP Tutorial Circuit Maker + TP simulation)
2. Quadripôles
(Cours + TD + TP simulation + Contrôle)
3. Semi-Conducteurs. Diode
(Cours + TD + TP simulation)
4. Transistor bipolaire. TEC
(Cours + TD + TP simulation + Contrôle)
5. Amplificateur Opérationnel (AOP)
(Cours + TD + TP simulation)
6. CAN/CNA
(Cours + TD + TP simulation + Contrôle)
Projet
(Projet + Simulation + Rapport + Soutenance)
A venir
5’. Filtrage
5’’. Contre-Réaction. Stabilité. Oscillateurs sinusoïdaux
6’. Algèbre de Boole
Annexe
7. Modulation
Bibliographie
[1] J. Auvray « Electronique des signaux analogiques » Dunod
[2] R. Beauvillain / J. Laty « Electronique » Hachette
[3] A. Deluzurieux / M. Rami « Electronique analogique » Eyrolles
[4] J.M. Fouchet / A. Perez-Mas « Electronique pratique » Dunod
[5] M. Girard « Amplificateurs opérationnels » McGraw-Hill
[6] A.P. Malvino « Principes d’électronique » McGraw-Hill
[7] F. Manneville / J. Esqieu « Electronique » Dunod
[8] J.M. Poitevin « Electronique » Hachette
[9] J.J. Rousseau « Introduction à l’électronique » Ellipses
__________

Electronique Analogique 1. Théorèmes généraux des réseaux électriques
1. 1
1. THEOREMES GENERAUX DES RESEAUX ELECTRIQUES
1. Introduction
Electronique Analogique : Traitement des signaux analogiques
(≡ qui varient continuement dans le temps et en valeur)
Electronique Numérique : Traitement des signaux numériques
(≡ qui varient de façon discrète dans le temps et en valeur)
- Objectif de l’ELN
Réalisations :
Electriques
- en traitement du signal (analyse):
(un signal est une grandeur, qui varie
généralement en fonction du temps)
. Conditionnement
(Mise en forme, Prétraitement, Amplification,
Fonctions analogiques/numériques, Filtrage ...)
. Caractérisation
(Transformations fréquentielles)
. Détection - Estimation
(Moyenne quadratique...)
. Optimisation
(Filtrage optimal...)
. Acquisition - numérisation
(Echantillonnage, quantification)
. Codage - Décodage - Transmission d'un signal
(Modulation, Démodulation analogique et num. ...)
. Prédiction. Identification
(Prédiction linéaire)
-en synthèse de signal :
Exemples :
Rampe pour la base de temps d'un oscilloscope :
t
r(t)
Horloge pour ordinateurs :
t
h(t)
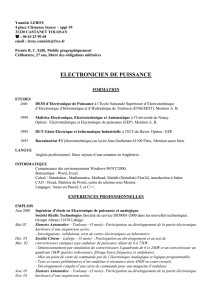
- Domaine de fréquences électrique :
(la fréquence d’un signal est sa vitesse de variation)
0
DC
20 Hz 400 Hz
Ultrasons
4 kHz
Téléphone filaire
15 kHz
Ondes sonores
100 kHz
20 kHz
Acoustique
3-4 MHz
Vidéo
50 MHz
Modulation
de fréquences
100 MHz
Télévision Radar
Navigation aérienne
300 GHz 1000 GHz
f
Fibres optiques
Circuits à constantes localisées
ondes longues ondes moyennes ondes courtes
1 GHz
ondes radio
ondes hertziennes
Circuits à constantes réparties
= 1 mm)λ(
Hertzienneanalog.
On néglige le temps de propagation Hyper fréquences (micro-ondes)
la vitesse du courant électrique (électrons) est supposée infinie
A un instant t
Le temps propagation ne peut
plus être négligé.
La taille du circuit est alors à prendre
en compte.
A un instant t
v v
Circuit à constantes localisées
v
1
v
2
Circuit à constantes réparties
v t
0
sin( )
ω
[
]
[ ]
)(sin)sin(
)(sin)sin(
20202
10101
τωϕω
τ
ω
ϕ
ω
−=−=
−
=
−
=
tvtvv
tvtvv
Rappel :
)sin (
0
tv
ω
ω
t
0
π
2
)sin (
0
tv
ω
t
0
T
te m p s
p
h a se ou a ng le

Electronique Analogique 1. Théorèmes généraux des réseaux électriques
1. 2
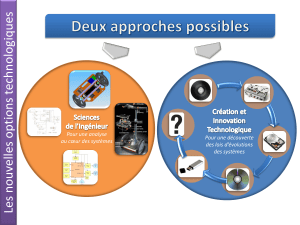
- Domaine de fréquences optique :
L
U
M
I
E
R
E
f
INFRAROUGE ULTRA VIOLETS RAYONS γ
RAYONS X
10
9
Hz 10
10
10
11
10
12
10
13
10
15
10
16
10
17
10
18
10
19
10
20
10
21
10
22
Hz Hz Hz Hz 10
14
Hz Hz Hz Hz Hz Hz Hz Hz Hz
LUMIERE DOMAINE DU VISIBLE : [ λ = c / f ] (longueur d'onde)0.4 µm < λ< 0.8 µm
ROUGE JAUNE VERT BLEU INDIGO VIOLET
:
INFRAROUGE
ORANGE
ULTRA VIOLET
c m s=3 10
8
. /
- Fibres optiques :
Fibre optiqueSignal électrique
tConversion
électricité-lumière
Photodiode Diode photoréceptrice
Conversion
lumière-électricité
- Domaines d'amplitudes :
(l’amplitude d’un signal témoigne de son intensité, de son volume, de sa puissance)
10
-16 W 1 W 108W
ELN des petits signaux ELN de puissance
Rappel : puissance moyenne d’un signal
)(tx
sur la durée
T
:
∫
=
T
dttx
T
P)(
1
2
- Définitions : - Dipôle : Dispositif à 2 connexions.
- Tripôle : Dispositif à 3 connexions.
Il peut être vu comme 2 dipôles (un dipôle d’entrée et un dipôle de sortie) avec une
référence commune :
- Quadripôle : Dispositif à 4 connexions.
Il peut être vu comme 2 dipôles (un dipôle d’entrée et un dipôle de sortie):
- Multipôle : Dispositif à
n
connexions (
n
entier ≥ 2).
Il peut être vu comme plusieurs dipôles et quadripôles.
Multipôle passif : Multipôle qui ne peut fournir de l'énergie de façon permanente.
≠
≠≠
≠ Multipôle actif. (un multipôle, actif ou passif, peut être générateur ou récepteur).
- Notations :
X (
= x(t)
)
: grandeur (≡ signal) variable en fonction du temps
t
Représentation Temporelle
X
: grandeur constante, dite aussi continue ou encore offset. Un grandeur continue peut être
vue comme un signal périodique de période infinie, donc de fréquence nulle.
X
(
j
ω
)
(
= X
)
: grandeur complexe associée à
x(t)
en régime harmonique (≡ sinusoïdal)
X
est complexe : amplitude |
X
| et phase Arg[
X
] de la sinusoïde
x(t)
de pulsation
ω
La notation X est aussi utilisée pour les grandeurs complexes, pour alléger les écritures, le contexte étant souvent suffisamment
explicite.
S
oit :
A
: amplitude;
ϕ
: phase initiale on a (Représentation de Fresnel) :
[
]
)sin()cos()(
)(
ϕωϕωω
ϕω
+++=⋅=
+
tjtAeAjX
tj
Représentation Fréquentielle
[
]
)()cos()(Re txtAjX
=
+
⋅
=
ϕ
ω
ω

Electronique Analogique 1. Théorèmes généraux des réseaux électriques
1. 3
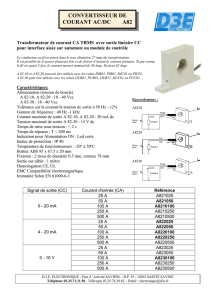
Représentation (diagramme) de Fresnel (Représentation Fréquentielle)
La représentation de Fresnel associe un vecteur tournant à la grandeur complexe associée à un signal sinusoïdal.
x(t)
A(t)
P
t
0
0
t
1
T (période)
M=A(t)
P
)
(
1
t
ϕ
)
(
ω
j
X
)
(
t
x
T
T/4 T/2
B
B
π/2
)(
ω
jX
complexe associé à
)(tx
:
tjj
eMeMjX
ωϕ
ω
⋅=⋅=)(
)sin()( tBtx
ω
⋅
=
Angle ou phase :
11
)( tt ⋅=
ωϕ
T
⋅
=
ω
π
2
→
f
T
π
π
ω
2
2==
(
f
: fréquence)
=
=
t
tAM
jX
ωϕ
ω
Argumentou Phase
Module
)(
)(
ϕ
ω
j
eMjbajX ⋅=+=)(
I
b
P
R
0
a
ϕ
22
baOPM +==
)/arctan( ab
=
ϕ
Représentation d’Euler :
)sin()cos( tjte
tj
ωω
ω
+=
2
)cos(
tjtj
ee
t
ωω
ω
−
+
=
j
ee
t
tjtj
2
)sin(
ωω
ω
−
−
=
Opération de dérivation en Représentation de Fresnel :
)(tx
sinusoïdal ↔ complexe :
)(
)(
ϕω
ω
+
⋅=
tj
eAjX
dt
tdx )(
↔
)(
)(
ωωω
ϕω
jXjAej
tj
=⋅
+
Représentation Temporelle
↔
Représentation Fréquentielle
Définitions
- Potentiel : Un potentiel électrique (mesuré en Volts) est un niveau de charge électrique.
En ce point et un autre point
de potentiel inférieur existe alors une différence de potentiel ou tension électrique (exprimée en Volts) autorisant la circulation d’un courant
électrique (si le circuit est fermé) descendant le potentiel et mesuré en Ampères.
- Tension : Différence de potentiel électrique entre 2 points d’un circuit (mesurée en Volts).
- Courant : Flux d’électrons circulant dans un conducteur. Son intensité est mesurée en Ampères.
- Masse (Ground) : C’est la référence relative des potentiels
(en général, la borne - de l’alimentation)
(0 Volt relatif)
.
- Terre : C’est la référence absolue des potentiels
(0 Volt absolu)
.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
1
/
190
100%