Modélisation d`une alimentation à découpage par un circuit conçu

Afrique SCIENCE 03(3) (2007) 326 - 341
ISSN 1813-548X
T. Evariste WEMBE et al.
326
Modélisation d’une alimentation à découpage par un circuit conçu
autour du diac en série avec la gâchette d’un thyristor
T. Evariste WEMBE
1*
, B. John BILIKHA
2
, et C. Armand BITEN
1
1
Université de Douala, Faculté des sciences, Département de physique, Laboratoire
d’automation et de contrôle (ACL), B.P. 24157 Douala, Cameroun
2
Ecole Nationale Supérieure Polytechnique, Université de Yaoundé I, Laboratoire
d’automation et de contrôle (ACL), B.P. 8390 Yaoundé I, Cameroun

Afrique SCIENCE 03(3) (2007) 326 - 341
T. Evariste WEMBE et al.
327
Abstract
Modelling a switching power supply by a circuit designed around a diac in
series with the trigger of a thyristor
This article presents a new Switching power supply, conceived without a “high frequency
transformer” substituted by a new circuit called “Circuit depressor”. The application of
the algorithm on the basis of method of the linear interpolation allows giving the
dimension of certain components according to the various angles of starting which
govern a new circuit. An example of prototype is study with the following characteristics:
a dc voltage of
13.8 Volts
at exit, a low sensitivity in spite of a variation which is in the
order from ± 50 % compared to the ac voltage of 230 Volts. Moreover, this system will
support load of
3.5 Ω
and a current of
4 Amps
. Our new system can adapt to other
characteristics more constraining i.e., strong current and any other value of dc voltage at
the exit by choosing one angle of starting among these:
2π/3
or
3π/4
. The success of
the regulation is conceived around a
diac
in series with the trigger of the
thyristor
and a
circuit of modulation of width of impulse (PWM) which one usually meet in the Switching
power supplies.
Keywords :
Thyristor, diac, power supply, miniaturization, strong current.
1. Introduction
Il y a encore quelques années, les alimentations dites linéaires suffisaient. Aujourd’hui,
la demande de courants toujours plus élevés n’est pas sans poser de problèmes et
nécessite des composants de qualité. Le fait de découper à haute fréquence est important
car plus on découpe vite, plus on peut réagir vite face aux sollicitations extérieures, plus
on manipule de petites qualités d’énergie et plus on peut réduire la taille des
composants. Pour un transformateur, sa taille est inversement proportionnelle à ses
fréquences d’utilisation [1-5].
A priori, le découpage apparaît donc comme une solution idéale, mais il a des
inconvénients notables au niveau de la compatibilité électromagnétique notamment.
Découper très vite génère des pics et des variations ultra rapides de la tension et du
courant, et qui dit variations rapides dit interférences et rayonnements
électromagnétiques. Il faut absolument les contenir et les atténuer pour éviter de polluer
l’environnement électrique.
Dans ces alimentations, une limitation va être impérativement respectée, ne jamais
avoir plus de 50 % de rapport cyclique (en fait un peu moins pour avoir une marge de

Afrique SCIENCE 03(3) (2007) 326 - 341
T. Evariste WEMBE et al.
328
sécurité) car il faut laisser le temps au transformateur de libérer son énergie résiduelle
sinon c’est la saturation assurée [1]. Il faut généralement autant de temps pour le
charger que pour le décharger intégralement. Cela limite la quantité d’énergie que les
transistors peuvent délivrer en une impulsion car il y a beaucoup de temps mort (T
off
) par
rapport à une période. Tout cela aussi limite la puissance que l’alimentation peut
délivrer.
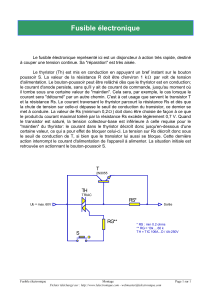
Pour contourner ces difficultés présentées par le transformateur, nous allons adapter un
dispositif conçu autour d’un Thyristor en série avec le Diac permettant d’abaisser la
tension continue non lissée 325V à une valeur continue acceptable qui attaque un
transistor de puissance [6-8].
On cherche à obtenir un meilleur résultat que les précédents systèmes avec
transformateur, et la régulation se fait toujours grâce à un circuit de modulation de
largeur d’impulsion (MLI).
Dans la suite, on étudiera d’abord le dispositif de l’alimentation sans transformateur,
puis on présentera la méthode de dimensionnement ainsi que les nouvelles perspectives
offertes.
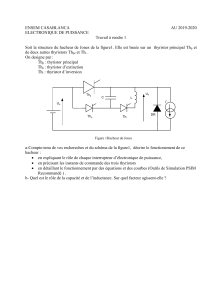
2. Fonctionnement et méthode
2-1. Aspect global
Figure 1 :
Schéma synoptique d’une alimentation à découpage avec transformateur
haute fréquence
.

Afrique SCIENCE 03(3) (2007) 326 - 341
T. Evariste WEMBE et al.
329
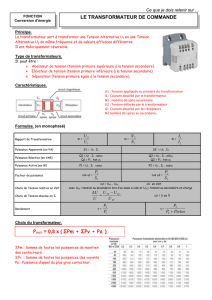
Figure 2 :
Schéma synoptique d’une alimentation à découpage sans transformateur
haute fréquence.
Le schéma synoptique proposé pour ’alimentation à découpage sans transformateur
correspond à la
Figure 2
. Il se déduit du schéma classique présenté à la
Figure 1
, en
remplaçant le module PFC par un circuit abaisseur commandé, et en supprimant le
transformateur de haute fréquence [2,3]. Le nouveau schéma proposé fonctionne comme
suit :
La tension du réseau est d’abord filtrée, redressée pour obtenir une tension continue de
325V DC. Cette tension attaque le « circuit abaisseur » qui délivre à sa sortie une tension
continue basse non régulée selon les caractéristiques des cahiers de charge. Cette
tension continue est découpée à l’aide d’un ou plusieurs transistors à découpage selon
les topologies électriques adoptées. Le transfert d’énergie s’effectue alors au rythme du
découpage à travers les blocs « Diodes redressement » et « Lissage filtrage », et une
tension continue plus basse est délivrée en sortie de l’alimentation. Cette tension de
sortie suivant la charge est régulée en modulant la largeur des impulsions créées par un
système de régulation (MLI) [1,9].
Le fonctionnement étant décrit, il est important d’étudier en détail la structure et les
caractéristiques du nouveau module constitutif appelé « Circuit abaisseur ».
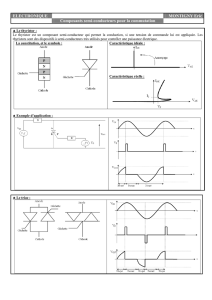
2-2. Abaisseur en courant continu
La tension continue de
325 V
non lissée attaque le circuit de la
Figure 3
et le
fonctionnement de ce circuit est amélioré en ajoutant en série avec le thyristor, un diac.
Tant que la tension au point A est inférieure au seuil de conduction du diac, le courant
prélevé sur le condensateur C
1
est nul et l’évolution de la tension à ses bornes

Afrique SCIENCE 03(3) (2007) 326 - 341
T. Evariste WEMBE et al.
330
parfaitement calculable. Cette tension atteinte, le diac devient brusquement conducteur
envoyant sur la gâchette un fort courant qui amorce le thyristor. Plus la résistance R
1
est
grande et plus le retard entre le début de l’alternance et la conduction du thyristor est
longue.
Figure 3 : Circuit abaisseur DC-DC
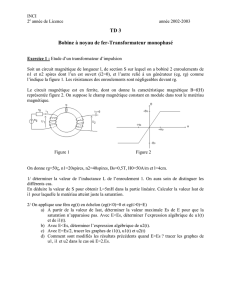
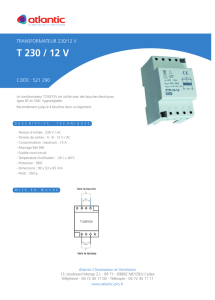
L’instant de conduction peut presque atteindre la fin de l’alternance [6]. En réglant
R
1
, on
peut obtenir en sortie des petites tensions, mais la présence de la diode
D
empêche le
retour de la tension du condensateur
C
2
permettant que le thyristor après son amorçage
puisse se bloquer à la fin de chaque alternance, par exemple voir
Figure 4
.
Figure 4 :
Abaissement de tension avec une bonne valeur de courant de charge. (La
graduation en ordonnée est en volt, et la graduation en abscisse, en radian)
2-3. Paramétrage
Le signal qui attaque le circuit de la
Figure 3
est une tension continue de 325 Volts issue
d’un redressement double alternance.
Toute fois que la tension au point A est inférieure au seuil de conduction du diac, le
courant prélevé sur le condensateur C
1
est nul et l’évolution de la tension à ses bornes
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%