Document

Guidage d’un missile par alignement
Classe : ING 2 BUREAU D’ETUDE D’AUTOMATIQUE
COURS DE COMMANDE CLASSIQUE DES SYSTEMES LINEAIRES CONTINUS
Guidage d’un missile « sol-air » par alignement
PRESENTATION DE LA BOUCLE DE GUIDAGE
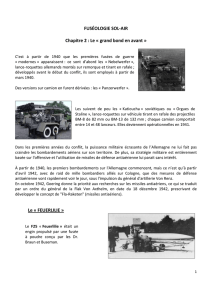
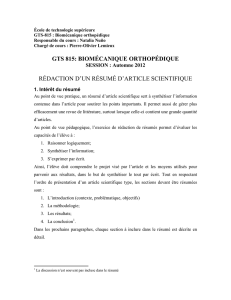
Le missile M, guidé par la conduite de tir O, doit rejoindre le « but » B désigné en suivant une
loi de guidage qui tend à réaliser l'alignement du radar de poursuite, du missile et du but. Il
s'agit d'aligner les points O, M et B, c’est à dire de superposer les droites OM et OB. Tout
écart du missile par rapport à la droite radar-but OB (ligne de visée) conduit à l'élaboration
d'un ordre de guidage par le calculateur de tir. Cet ordre, envoyé au missile par un moyen de
télécommunications adapté, actionne les commandes de vol du missile pour modifier sa
trajectoire et réaliser l'alignement souhaité.
B (but)
M (missile)
x0
y0
antenne
radar
de tir correcteur
de guidage transmission
d'ordre
φ
φB
(verticale)
y
yB
O
L'étude du guidage du missile est faite dans un plan vertical. On choisit un système de
référence (Ox0 , Oy0) lié à la conduite de tir. On admet que la droite OB fait un angle
φ
B petit
par rapport à l'axe Ox0.
L'asservissement tend à annuler l'écart angulaire
φ
φ
φ
−
=
Δ
B
, ou encore l'écart métrique
, en agissant sur l'accélération verticale (/ du missile. L'entrée de la boucle
d'asservissement est donc
(yy
B−))
2
dydt
2
B
y et sa sortie y.
Beslc1_texte_matlab_élèves 17/01/2006 Cours de M. Cougnon
-1-

Guidage d’un missile par alignement
L'écartométrie du radar de conduite de tir délivre une tension telle que : )(te
p
K
p
YY E
R
R
B
τ
+
=
−1
)(
)(
Le signal est filtré par un correcteur de transmittance J(p) dont la sortie m(t) est le signal
de commande du missile. On considère, dans un premier temps, que le système de
transmission d’ordre est un simple gain dont il est tenu compte dans la fonction de transfert
du correcteur.
)(te
L'évolution du missile dans le plan vertical est décrite par le système d'équations suivant :
M
E
pJp() ()= Fonction de transfert du correcteur à
concevoir
dyt
dt VA t
2
2
() ..()=
α
dt
dt Atqt
α
α
() .() ()=− +
dq t
dt BtCqtDmt
() .() .() .()=++
α
Equations issues de la mécanique du vol
V = vitesse du missile
α
= incidence du missile
q = vitesse de tangage du missile
On pourra utiliser les outils disponibles dans MATLAB pour traiter le sujet.
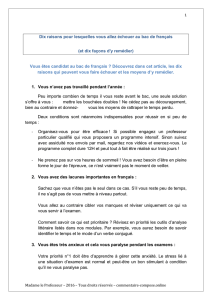
I. ETUDE GENERALE DU SYSTEME DE COMMANDE
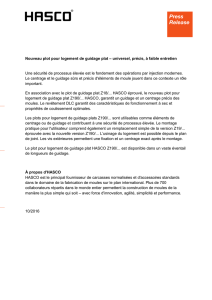
I.1. SCHEMA FONCTIONNEL DE LA BOUCLE DE COMMANDE
1. Construire, à partir des précédentes équations, le schéma fonctionnel de la boucle de
guidage selon le modèle suivant.
Beslc1_texte_matlab_élèves 17/01/2006 Cours de M. Cougnon
écartométrie
du radar
M(p)E(p)
YBY(p)
correcteur
+_1/p
dynamique du missile
++
+
+_1/p1/p
La notation majuscule indique que l’on a affaire à une transformée de LAPLACE. Ainsi
[]
)()( tepE L=
-2-

Guidage d’un missile par alignement
I.2. FONCTION DE TRANSFERT EN BOUCLE OUVERTE.
L’analyse des qualités de vol du missile permet d’obtenir les coefficients A, B, C et D.
Les valeurs numériques retenues sont les suivantes :
A = 2,375 B = −95,5 C = −2,575 D = 1,48
KR = 1 volt/mètre
τ
R = 0,05 s V = 510 m/s
2. Calculer la fonction de transfert Y
M
p()
du missile
3. Calculer la FTBO(p) du système sans correcteur
Dans la suite du problème on admettra que cette transmittance est donnée par :
)1
20100
).(05,01.(
65,17
)( 2
2+++
=pp
pp
pKG
Pour l’ensemble de l’étude, on utilisera les instructions classiques de la CST ainsi que le
SISO :
4. Construire le lieu de NYQUIST de KG(j
ω
). Justifier le résultat obtenu notamment pour
0→
ω
et ∞→
ω
.
5. Construire le diagramme de BODE et le lieu de BLACK-NICHOLS de la KG(j
ω
).
6. Tracer le lieu de EVANS.
7. Faire la synthèse des résultats ainsi obtenus. En déduire que l'implantation dans la
chaîne directe de la boucle d'asservissement d'un correcteur J(p) est indispensable.
II. CORRECTION DU SYSTEME
II.1. CALCUL D’UN CORRECTEUR A AVANCE DE PHASE.
On introduit un réseau correcteur de transmittance :
p
p
KpJ c
τ
τ
+
+
=1
101
)(
8. Quelle est l'avance de phase maximale qu'il permet d'obtenir ?
9. Quelle est la pulsation max
ω
sur laquelle ce réseau doit faire intervenir son avance de
phase maximale pour obtenir :
[]
°
−
=
160)()(arg maxmax
ω
ω
jJjKG
10. Quelle valeur faut-il donner à
τ
pour qu'il en soit ainsi ?
11. Mesurer la marge de gain et la marge de phase du système ainsi corrigé avec 1
=
c
K.
Beslc1_texte_matlab_élèves 17/01/2006 Cours de M. Cougnon
-3-

Guidage d’un missile par alignement
12. Tracer le lieu de BLACK-NICHOLS de la FTBO ainsi corrigée et en déduire la valeur du
gain à donner à pour que la stabilité du système soit assurée avec une marge
de phase maximale.
0c
Kc
K
13. Reprendre la question précédente en ajustant avec le SISO la valeur à donner à
pour que la stabilité du système soit assurée avec une marge de phase maximale.
0c
K
c
K
14. Tracer le lieu de BLACK-NICHOLS et le lieu de EVANS de la )(
ω
jFTBO ainsi corrigée
et évaluer la marge de phase 0
φ
Met la marge de gain du système corrigé.
0
Mg
15. On précisera par ailleurs :
• la valeur qu'il faut donner à pour rendre le système juste oscillant ;
osc
Kc
K
• la pulsation osc
ω
des auto oscillations ainsi obtenues.
II.2. PERFORMANCES DU SYSTEME CORRIGE
Le correcteur étant réalisé comme indiqué ci-dessus on obtient . Dans ces conditions :
)(
0pJ
16. Donner la pulsation de résonance
R
ω
et le coefficient de surtension de la
dB
Q
)(
ω
jFTBF ainsi que la pulsation de coupure dBc 6−
ω
de la )(
ω
jFTBF ;
17. Tracer la réponse indicielle de la boucle de commande. Commentaires.
18. Calculer l'erreur d'accélération pour une évasive du but de 5g. [y].
tu
B=25 2
..()t
On désire améliorer la précision de la boucle de guidage afin que, pour une évasive de la cible
égale à 5g, la distance de passage soit inférieure à la distance maximale d’efficacité de la
charge militaire (5 mètres).
II.1. INSERTION D’UN CORRECTEUR A RETARD DE PHASE.
19. Déterminer un correcteur à retard de phase qui, placé en série avec le
correcteur , permettra d’obtenir la précision requise tout en conservant un
degré de stabilité de la boucle de guidage proche de celui obtenu précédemment avec
seul.
)(
1pJ
)(
0pJ
)(
0pJ
20. Vérifier les performances de la boucle de guidage ainsi réglée.
II.3. PERFORMANCES EN PRESENCE D’UN RETARD
En fait le système de transmission et le dispositif de codage-décodage des ordres de guidage
introduisent un retard pur évalué à 50 ms.
21. Etudier l’impact de ce retard sur les performances du système de commande compensé
avec (Cf. polycopié Au41 chapitre 9 page 11).
)()()( 10 pJpJpJTx=
22. Tracer le lieu de Black-Nichols du système compensé par et affecté du retard.
Que devient la marge de phase ? )(pJ
23. Pour quelle valeur de ce retard le système est-il juste oscillant ?
Beslc1_texte_matlab_élèves 17/01/2006 Cours de M. Cougnon
-4-
1
/
4
100%