Architecture des Systèmes Programmés Architectures

septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 1
Architecture des
Systèmes Programmés
(6 conférences)
Architectures CISC et VLIW : J.Weiss 4 conférences
Microprocesseurs 8, 16 et 32 bits d’usage général (8080, ..., Pentium 4)
Microcontrôleurs 8 et 16 bits (68hc11, 8051 et PIC)
Nouvelles architectures (Itanium, IA64 et TransMeta)
Processeurs graphiques (GPU)
Mémoires
Architectures RISC et DSP : P. Leray 2 conférences
Processeurs RISC (PowerPC, Alpha, ...)
DSP (TMS320, 56000, ...)
Bus de communications
septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 2
Architectures
ZISC : Zero Instruction Set Computer
Autrement dit : Processeur Câblé (et donc PAS programmé)
CISC : Complex Instruction Set Computer
Processeur possédant un jeu d’instructions fourni de longueur
et de temps d’exécution variables.
VLIW : Very Long Instruction Word
Processeur possédant un jeu d’instructions encore plus fourni
que le cas du CISC (longueur et temps d’exécution variables).
RISC : Reduced Instruction Set Computer
Processeur possédant un jeu d’instructions réduit de longueur
et de temps d’exécution fixes
Page 1

septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 3
Microprocesseurs d’usage général
à architecture CISC
Architecture de base des microprocesseurs
Historique de l’informatique et des Microprocesseurs
ALU, Registres
Composants périphériques
Microprocesseurs et Microcontrôleurs 8 bits
Microprocesseurs 16 bits
Gestion de mémoire virtuelle, caches
Microprocesseurs 32 bits
1ère Génération : 80386, 68020
2ème Génération : Pentium
3ème Génération : Pentium Pro, Pentium II
4ème Génération : Pentium 4, TransMeta
Microprocesseurs 64 bits
septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 4
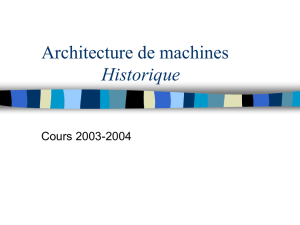
50 ans d’histoire de
l’industrie informatique
ENIAC :
1er Ordinateur
1947
Mise au point
du transistor
1948
1er ordinateur
IBM
1955
Fondation de
Fairchild SC
1957
Invention du
circuit intégré
(Kilby et Noyce)
1958-59
Mini-ordinateur
DEC
1963
Fondation
d’Intel
1968
1971
1er µP
1ère EPROM
Intel
Fondation de
Microsoft
1975
1977
Apple II
1981
IBM-PC
1985
386
1989
486
1993
Pentium
1997
Pentium II
2000
Pentium 4
Page 2

septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 5
État de l’informatique en 1968
1948 : 1er ordinateur : ENIAC (30 tonnes 85 m3)
(Electronic Numerical Integrator And Computer)
1968 : 30.000 ordinateurs dans le monde :
Mainframes (plusieurs pièces)
Mini-ordinateurs (taille d’un réfrigérateur)
Programmation : Cartes et bandes perforées
septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 6
Historique des
Microprocesseurs CISC
1960 Premiers CI
1964 SSI AND, OR
1968 MSI Registres
1971 LSI DRAM 1 kbits, µP 4 bits (4004 d’Intel)
2,3 kT 1972 8 bits 1ère G. 8008 (Intel)
1973 8 bits 2ème G. 8080 (Intel), 6800 (Motorola)
1975 8 bits 3ème G. 8085 (Intel), 6809 (Motorola), Z80 (Zilog)
1976 16 bits 1ère G. TMS 9900 (Texas Instruments)
1978 16 bits 1ère G. 8086 (Intel) IBM-PC/XT
1979 16 bits 1ère G. 68000 (Motorola) MAC
1982 16 bits 2ème G. 80286 (Intel) IBM-PC/AT
1983 32 bits 1ère G. 32032 (National)
1984 32 bits 1ère G. 80386 (Intel), 68020 (Motorola)
1987 32 bits 1ère G. 68030 (Motorola) SUN3
1989 32 bits 2ème G. 80486 (Intel)1,2 MT 1993 32 bits 3ème G. Pentium (Intel)
1995 32 bits 3ème G. PentiumPro (Intel)
1997 32 bits 3ème G. Pentium II (Intel)
5,5 MT
2000 32 bits 4ème G. Pentium 4 (Intel)
42 MT 2007 32 bits 4ème G. Core 2 Quad (Intel)
580 MT 2008 64 bits 2ème G. Itanium 2 dual core (Intel)
1900 MT
Page 3

septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 7
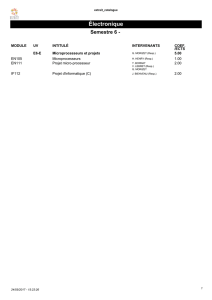
Création d’Intel :
les «Fairchildren»
Bob Noyce : Fondateur
Invention du circuit intégré en 1959
Fondateur et ex dirigeant de Fairchild Semiconductor
Gordon Moore : Fondateur
Invention du circuit intégré en 1959
Fondateur et ex responsable R&D de Fairchild Semiconductor
Andy Grove : N°4 d’Intel
Docteur en Chimie
Ex responsable de fabrication de Fairchild Semiconductor
septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 8
Les débuts d’Intel
1969 : mémoires SRAM 64 bits (bipolaire)
1970 : conception du premier microprocesseur :
4004 pour Busicom (Japon) :
Technologie MOS 10 µm 3,17*4,23 mm²
2300 T
1971 : Commercialisation du premier microprocesseur : 4004
Page 4

septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 9
Succès d’un produit
Le succès d’un produit est lié à :
Diffusion : Microinformatique (x86)
Marchés militaires (Z80.000)
Marchés captifs (Rockwell, Comodore)
Prix : existence de 2ndes Sources
Environnement : existence de périphériques
de systèmes de développement
Arrivée sur le marché
Notion de «famille» : x86, 680x0
septembre 09 Microprocesseurs d’usage général : Introduction ; J. Weiss 10
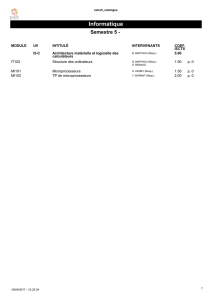
Technologie des microprocesseurs
Loi de Moore
Nombre de transistors
Temps
1 k
10 k
100 k
1 M
10 M
100 M
1970 1975 1980 1985 1990 1995 2000
4004 8080
8086
286 386
486 Pentium
Pentium II
Pentium 4
Page 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%