Lycée des Métiers Marcel Barbanceys Activité de cours

Lycée des Métiers Marcel Barbanceys Activité de cours
N. ROIATTI Page 1 1 BAC
ARCHITECTURE D’UN SYSTEME AUTOMATISE
1 Composants et frontière du système
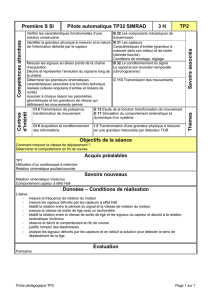
Un système automatisé permet de réaliser des opérations ou séquences
d’opérations sur une matière d’œuvre.
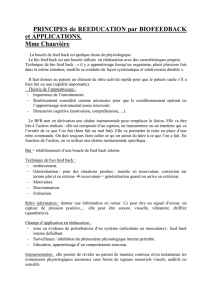
Un système automatisé est constitué de deux principales parties :
La partie commande
: elle inclus les capteurs et le calculateur. Elle permet
l’acquisition et le traitement de signaux afin de commander la partie opérative.
La partie puissance ou opérative
: la fonction de cette partie est de
transformer les signaux de commandes en action sur la matière d’œuvre, elle
est aussi nommée partie puissance. Elle est constituée des pré-actionneurs
et des actionneurs.
Nom :
Prénom :
Activité de Cours
SYSTEMES AUTOMATISES
LYCEE des METIERS
MARCEL BARBANCEYS
Savoirs Associés: S 51, S 52, S 53, S 56, S 57, S 58, S 59
Calculateur
Capteur B
Capteur A
Capteur C
Actionneur 3
Actionneur 1
Actionneur 2
Acquisition
Traitement et Commande
Partie Opérative
Ou
Partie puissance
Partie Commande

Lycée des Métiers Marcel Barbanceys Activité de cours
N. ROIATTI Page 2 1 BAC
2 Classification des systèmes automatisés
Il est possible de classifier les systèmes automatisés selon plusieurs critères :
Technologie du calculateur
Systèmes analogiques
, la logique de commande est basée sur des calculs
analogiques, c'est-à-dire des opérations sur des grandeurs analogiques
(tension, intensité…) Exemple : boîtier de gestions de sécurité sur machines
de parcs et jardins, système de correction d’assiette sur moissonneuses.
Remarque : Ces systèmes analogiques sont remplacés par des systèmes
numériques, plus fiables et avec des performances nettement supérieures.
Systèmes numériques
, la logique de commande est basée sur des
opérations numériques, les signaux analogiques sont convertis en signaux
numériques (binaire, hexadécimal) afin que le microcontrôleur
(microprocesseur) puisse effectuer des opération logiques sur ces données.
Remarque : les systèmes numériques sont plus puissants et plus adaptatifs que
les systèmes analogiques, en ce sens, il caractérisent la majorité des systèmes
actuels.
3 Eléments constitutifs des systèmes automatisés
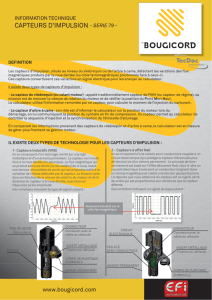
Les
capteurs
réalisent la transformation de grandeurs physiques en grandeurs
électriques :
Ils peuvent être de différentes technologies :
Capteurs résistifs : thermistances, magnéto résistifs, jauge de contrainte…,
Capteurs magnétiques : inductifs, LVDT,
Capteurs effet Hall : simple ou double plaquette de Hall,
Capteurs piezo électriques,
Capteurs capacitifs,
Capteurs optiques.
A-0
Transformer une grandeur
physique en grandeur
électrique directement
exploitable par le calculateur
Grandeur physique
à mesurer
(P, F, , T, q)
Grandeur Electrique
(U, R)
CAPTEUR
Energie
électrique
Valeurs de
consignes
et réglages
Pertes
calorifiques

Lycée des Métiers Marcel Barbanceys Activité de cours
N. ROIATTI Page 3 1 BAC
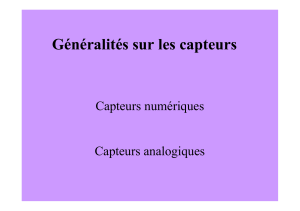
Voici quelques visualisations de ces capteurs :
Le
calculateur
réalise différentes fonctions, parmis lesquelles :
La transformation et la mise en forme des signaux, c’est le rôle de
l’interface
d’entrée
,
Les calculs et commandes, c’est le rôle du
microcalculateur
,
L’amplification des signaux de commande, c’est le rôle de
l’étage de sortie
.
L’interface d’entrée
C'est la partie de l'interface par laquelle transitent les informations provenant des
capteurs de la machine. Les signaux issus de ces capteurs y sont mis en forme et
purifiés, afin de pouvoir être traités par le microcalculateur. Cette partie de l'inter-
face assure donc la conversion analogique
logique grâce à des Cl logiques.
Les Circuits lntégrés contenus dans le calculateur étant très sensibles aux parasites
et aux surtensions, l'alimentation passe par un régulateur de tension muni de ses
condensateurs de filtrages.
Le microcalculateur
,
C'est la partie du calculateur qui effectue le traitement des données issues de
l'interface d'entrée. Un quartz (horloge) fixe la fréquence de fonctionnement des
divers éléments de ce microcalculateur, c'est à dire :
le microprocesseur
la mémoire morte
les mémoires vives

Lycée des Métiers Marcel Barbanceys Activité de cours
N. ROIATTI Page 4 1 BAC
Le microprocesseur
II constitue l'unité de travail du système. Il ne peut traiter que des
données numériques , celles ci sont issues de l'interface d'entrée.
Il travaille dès qu'il est alimenté, il ne peut effectuer qu'une seule opération à
la fois, mais sa fréquence de travail est très élevée. Pour opérer, il doit consulter une
banque de données, en l'occurrence une mémoire morte contenant sous forme
numérique toutes les données constructeur nécessaires au bon fonctionnement de la
machine.
C'est également une unité de commande qui gère le déroulement des opérations et
commande le fonctionnement des actionneurs .
Si une donnée erronée, panne capteur par exemple, parvient au microprocesseur,
cette donnée n'étant pas inscrite dans la ROM (Read Only Memory), le
microprocesseur va adopter une valeur moyenne, c’est le mode dégradé . Le
fonctionnement de la machine est assuré, mais une anomalie a eu lieu, ce qui peut
provoquer l'allumage du voyant de panne électronique.
Les mémoires mortes
Au départ, ces mémoires mortes étaient des ROM dont le contenu était inscrit
définitivement, toute modification de la cartographie entraînait le remplacement du
calculateur .
Actuellement, l'utilisation des EEPROM (Electrically Erasable Programmable Read
Only Memory) permet de modifier la cartographie sans dépose du calculateur , ceci
étant rendu possible grâce à l'utilisation des CD ROM et des valises constructeurs.
Une mémoire annexe du type EEPROM permet de conserver les anomalies de
fonctionnement jusqu'à leur effacement. Cet effacement ne peut se faire qu'à l'aide
d'un code électrique : valise diagnostic ou démarrages successifs sans réapparition
de l'anomalie.
Les mémoires vives
Elles se chargent pendant le fonctionnement de la machine , leur contenu
évolue sans arrêt : évolution de la température, de la vitesse, de la distance
parcourue...
Elles perdent une grande partie de leur contenu à la coupure du contact pour pouvoir
se recharger avec de nouveaux paramètres au redémarrage du système.
l’étage de sortie
Les signaux de commande issus du microprocesseur sont de très faible puissance.
Les actionneurs réclament pour fonctionner une puissance relativement importante
ce qui nécessite un étage de puissance (transistors & thyristors).
La dissipation calorique impose que les composants soient fixés sur des radiateurs.

Lycée des Métiers Marcel Barbanceys Activité de cours
N. ROIATTI Page 5 1 BAC
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%