Capteurs d`impulsion_version2.indd - mp-i.eu

www.bougicord.com
INFORMATION TECHNIQUE
CAPTEURS D’IMPULSION
DEFINITION
Les capteurs d’impulsion, situés au niveau du vilebrequin ou de l’arbre à came, détectent les varations des flux
magnétiques produits par la roue dentée (ou cible ferromagnétique) positionnés face à ceux-ci.
Ces capteurs convertissent ces variations en signal électrique pour les envoyer au calculateur.
Il existe deux types de capteurs d’impulsion :
- Le capteur de vilebrequin (ou volant moteur) : appelé traditionnellement capteur de PMH (ou capteur de régime), sa
mission est de mesurer la vitesse de rotation du moteur et de vérifier la position du Point Mort Haut.
Le calculateur utilise l’information remontée par ce capteur, pour calculer le moment de l’injection du carburant.
- Le capteur d’arbre à came : son rôle est d’informer le calculateur sur la position du moteur lors du
démarrage, en lui communiquant la position du cylindre en fin de compression. Ce capteur permet au calculateur de
contrôler la séquence d’injection et la synchronisation de l’étincelle d’allumage.
En comparant les informations provenant des capteurs de vilebrequin et d’arbre à came, le calculateur est en mesure
de gérer plus finement sa gestion moteur.
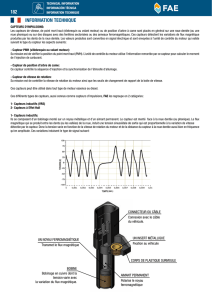
1- Capteurs Inductifs (VRS)
Ils se composent d’un bobinage monté sur une tige
métallique et d’un aimant permanent. Le capteur est monté
face à la roue dentée (ou phonique). Le flux magnétique qui
se produit entre les dents (ou les vallées) de la roue, induit
une tension sinusoïdale de sortie qui est proportionnelle à la
variation de vitesse détectée par le capteur. La tension varie
donc en fonction de la vitesse de rotation du moteur et de la
distance du capteur à la roue dentée, aussi bien en
fréquence qu’en amplitude.
Ces variations induisent le type de signal suivant :
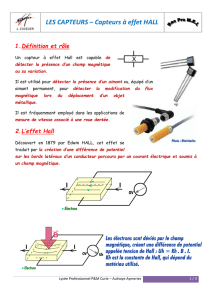
2 - Capteurs à effet Hall
Ils se composent d’une cellule semi-conductrice couplée à un
circuit électronique (qui protège le capteur d’éventuels pics
de tension) et d’un aimant permanent. Le principe de fonc-
tionnement est basé sur l’effet dénommé Hall, c’est-à-dire un
courant électrique traversant un conducteur baignant dans
un champ magnétique et créant une tension perpendiculaire.
La réponse que nous obtenons du capteur est un signal carré
de sortie qui est proportionnel aux variations que le capteur
détecte.
Ces variations induisent un signal du type suivant :
- SERIE 79 -
www.bougicord.com
INSERT MÉTALLIQUE
CONNECTEUR
Connexion avec le
câble du véhicule
CORPS DE PLASTIQUE
SURMOULE
Fixation au véhicule
AIMANT PERMANENT
TIGE EN ACIER
(Axe polaire)
BOBINE INSERT MÉTALLIQUE
CONNECTEUR
Connexion avec le
câble du véhicule
CORPS DE PLASTIQUE
SURMOULE
Fixation au véhicule
CIRCUIT
ÉLECTRONIQUE
CELLULE
SEMI-CONDUCTRICE
AIMANT PERMANENT
IL EXISTE DEUX TYPES DE TECHNOLOGIE POUR LES CAPTEURS D’IMPULSION :
Absence d’une dent sur la
cible ferromagnétique
1
/
1
100%