TP : Deuxième loi de Newton

1
TP : Deuxième loi de Newton
Objectifs :
- Construire des vecteurs vitesse et accélération
- Déterminer la constante de proportionnalité dans la deuxième loi de Newton
I. Construction de vecteurs vitesse et accélération
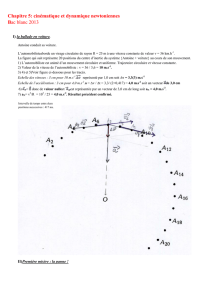
A la date t = 0, le point matériel est lancé d’un point M0 avec un vecteur vitesse initial . On
enregistre les positions occupées par ce point au cours du temps toutes les 0,10 s. On note τ = 0,10 s
la durée séparant deux points consécutifs. On obtient l’enregistrement joint.
o Construction de vecteurs vitesse :
Le vecteur vitesse moyen à l’instant ti au point Mi s’écrit :
Ce vecteur possède :
- une direction : tangente à la trajectoire au point Mi, parallèle à la droite (Mi-1Mi+1)
- un sens : celui du mouvement
- une valeur : vi = Mi-1Mi+1/(ti+1 - ti-1) = Mi-1Mi+1/2τ
Quelle est l’unité d’une vitesse ?
La vitesse s’exprime en m.s-1.
Construire les vecteur vitesse et du point mobile aux instants t3 et t5. On détaillera
soigneusement le raisonnement permettant de réaliser cette construction.
Tracé du vecteur :
On reporte le vecteur sur M3, puis, à la suite, on reporte le vecteur - . Le vecteur
est celui qui lie le point construit et le point M3. Ensuite, on mesure la taille du vecteur
et on la divise par Δt = 2τ = 0,20 s. On obtient une vitesse en m.s-1. Avec l’échelle
proposée, on peut tracer le vecteur vitesse . Ce vecteur est de même direction, même
point d’application et même sens que le vecteur .
On obtient : = 3,4 cm donc v3 = 0,17 m.s-1.
Tracé du vecteur :
On procède de la même manière que précédemment en remplaçant respectivement les
vecteurs et par les vecteurs et .
On obtient : = 3,6 cm donc v3 = 0,18 m.s-1.

2
Rq : Sur l’enregistrement l’échelle utilisée est : un carreau représentant 0,1 m/s.
o Construction de vecteur accélération :
On définit la variation du vecteur vitesse Δ à l’instant t4 par Δ = . Construire le
vecteur variation du vecteur vitesse Δ à l’instant t4 et déterminer sa valeur Δv à l’instant t4.
On détaillera soigneusement le raisonnement permettant de réaliser cette construction.
Pour tracer le vecteur Δ, on reporte le vecteur au point M4, puis le vecteur - à la suite.
Δ est le vecteur qui lie ce point et le point M4.
Peut-on obtenir la valeur Δv du vecteur Δ en calculant v = v5 – v3 ?
La norme d’une différence de vecteur n’est pas égale à la différence des normes de deux
vecteurs. On en peut donc pas calculer avec v = v5 – v3.
Le vecteur vitesse moyen à l’instant ti au point Mi s’écrit :
Quelle est l’unité d’une accélération ?
L’accélération s’exprime en m.s-2.
Déterminer la valeur de la norme du vecteur accélération .
donc a4 =
Pour avoir v, on mesure la taille du vecteur Δ construit précédemment. Avec l’échelle
précédente, on peut en déduire la norme en m.s-1 du vecteur Δ. On obtient : v=0,025m.s-1.
Donc a4 = 0,025/0,20 = 0,125 m.s-2.
Sur l’enregistrement, construire le vecteur . On détaillera soigneusement le raisonnement
permettant de réaliser cette construction.
Avec l’échelle des accélérations, on obtient un vecteur de 0,08 cm. Le vecteur est de
même direction, de même point d’application et de même sens que le vecteur . LA
taille du vecteur est si petite qu’on ne peut pas le dessiner.
Rq : Sur l’enregistrement, l’échelle utilisée pour les vecteurs accélération est de 1 carreau représente
2,5 m.s-2.

3

4
II. Deuxième loi de Newton ou théorème du centre d’inertie :
Deuxième loi de Newton (vue en première S) :
Dans un référentiel galiléen, si la résultante des forces s'exerçant sur un solide est
différente du vecteur nul , alors la vitesse de son centre d'inertie varie. La variation Δ et la
résultante des forces appliquées entre 2 instants ont même direction et même sens.
Δ = k
On va déterminer la constante de proportionnalité k.
On lâche un mobile autoporteur de masse m sans vitesse initiale sur un plan incliné d’un angle θ.
On obtient différents enregistrements suivant l’inclinaison de la table.
Quelle est la nature du mouvement du centre d’inertie du mobile ?
Le mouvement est rectiligne et accéléré.
Au cours du mouvement, tout se passe comme si le mobile était soumis à une force
constante, ayant même direction, de même sens que le mouvement et de valeur :
Enregistrement
1
2
3
4
Valeur de la force appliquée au mobile
F1 = 1,06 N
F2 = 1,36 N
F3 = 1,87 N
F4 = 2,24 N
La durée entre deux points consécutifs est τ = 0,1 s.
o Variation du vecteur vitesse en fonction de la valeur de la force :
Construire les vecteurs vitesse et du centre d’inertie du mobile aux instants t7 et t9
sur chacun des enregistrements.
Le mouvement est rectiligne. On peut donc calculer la norme du vecteur vitesse
directement en mesurant la distance A8A6.
Enregistrement 1 : v7 = 1,2/0,20 = 6 cm.s-1 et v9 = 1,6/0,20 = 8 cm.s-1
Enregistrement 2 : v7 = 1,55/0,20 = 7,75 cm.s-1 et v9 = 2,05/0,20 = 10,25 cm.s-1
Enregistrement 3 : v7 = 2,1/0,20 = 10,5 cm.s-1 et v9 = 2,8/0,20 = 14 cm.s-1
Enregistrement 4 : v7 = 2,5/0,20 = 12,5 cm.s-1 et v9 = 3,35/0,20 = 16,75 cm.s-1
L’échelle des vitesses choisie est 0,5 cm représente 1 cm.s-1.
Mobile autoporteur
G
Sens du mouvement
θ

5
Calculer la valeur de la variation du vecteur vitesse Δv8 à t = t8, puis calculer sur
chacun des enregistrements.
Enregistrement 1 : Δv8 = v9 – v7 = 2 cm.s-1 donc = 10 cm.s-1
Enregistrement 2 : Δv8 = v9 – v7 = 2,5 cm.s-1 donc = 12,5 cm.s-1
Enregistrement 3 : Δv8 = v9 – v7 = 3,5 cm.s-1 donc = 17,5 cm.s-1
Enregistrement 4 : Δv8 = v9 – v7 = 4,25 cm.s-1 donc = 21,25 cm.s-1
Pour un mouvement rectiligne seulement, la norme du vecteur variation du vecteur vitesse
entre les points A et B s’écrit .
Rq : pour un mouvement rectiligne, tous les vecteurs vitesse ont même direction (même vecteur
unitaire) donc
Tracer le vecteur et la force pour chacun des enregistrements. Comparer leur sens
et leur direction.
L’échelle des accélérations choisie est 0,5 cm représente 1 cm.s-2.
L’échelle des forces choisie est 2 cm représente 1 N.
et ont même direction et même sens.
Tracer Δv en fonction de F.
Conclure.
Δv est proportionnel à F.
o Accélération du mobile :
On ne considère que l’enregistrement n°1.
Construire les vecteurs vitesse , , , et du centre d’inertie du mobile aux
instants t5, t7, t9, t11 et t13.
On calcule la norme des vecteurs vitesse comme précédemment.
v5 = 4 cm.s-1, v7 = 6 cm.s-1, v9 = 8 cm.s-1, v11 = 9,75 cm.s-1 et v13 = 12 cm.s-1
 6
7
6
7
1
/
7
100%