Quelques ordres de grandeurs

Groupe A
Nahel Khellaf
Sayanthiny Santhanantham
Changfeng Song
Notions et ordres de
grandeurs en mécanique

Sommaire
Introduction
I) Les unités des notions en mécanique
A) Les unités fondamentales
B) Les unités dérivées
II) Maquette de mesure du moment
A) Comment utiliser notre maquette?
B) Comment ca marche ?
a) Graduation
b) Liaison pivot
c) Système vis-tournevis
C) Problèmes rencontrés et solutions
a) Le bras
b) Les flancs
c) Le bâti et les entretoises
D) Phénomènes mis en avant
III) Quelques ordres de grandeur
Conclusion
Annexe

Introduction
Le but de notre projet est de montrer et de faire comprendre toutes les notions de
mécanique associées à quelques ordres de grandeurs. Premièrement, nous allons nous
concentrer sur les définitions de toutes les unités utilisées en mécaniques. Ensuite, nous nous
pencherons sur la maquette que nous avons réalisée. Enfin, nous verrons des ordres de
grandeurs de quelques unes de ces notions.
Les 7 unités fondamentales du Système International
Quand nous avons eu notre sujet nous nous sommes d’abord penchés sur les unités que
nous pouvions utilisés. Nous les avons listés puis nous avons supprimés ce qui était inutiles
comme l’intensité sonore, le module d’Young, la limite élastique et la résilience. Une fois que
nous avions listés les unités nous avons décidé de liés les unités entres elles. Nous avons donc
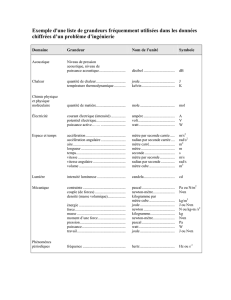
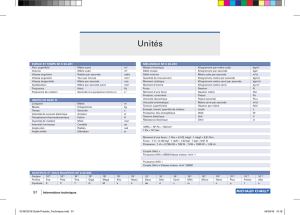
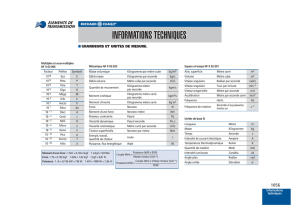
faits un tableau que vous pourrez voir en annexe I. Dans la suite, après nous être renseigné
auprès de notre tuteur, nous nous sommes informés sur les 7 unités fondamentales du système
international que nous pouvons voir sur le tableau ci-dessous :
Nous avons donc décidés de ne prendre que les unités qui étaient en rapport avec la
mécanique qui est le kilogramme, la seconde, le mètre et le kelvin. Nous avons donc défini
ces 4 unités en détails puis les 3 autres moins développées.
Grandeur Unité Expression
Masse kilogramme kg
Temps seconde s
Longeur mètre m
Température kelvin kg
Intensité électrique ampère A
Quantité de matière mole mol
Intensité lumineuse candela cd

KILOGRAMME
Le kilogramme est l’unité de base de masse du système international, noté kg.
C’est la seule unité du SI qui est exprimé au kilo (103).
Son nom provient du préfixe kilo du grec ancien « χίλιοι » (chílioi) signifiant mille et du
radical gramme, « γράμμα » (grámma), signifiant petit pois.
Le gramme est d’abord défini en 1795 comme étant « le poids absolu d'un volume d'eau pure
égal au cube de la centième partie du mètre, et à la température de la glace fondante », soit la
masse d’un centimètre cube d’eau pure à 4°C. C’est ce qui a fait du kilogramme la masse d’un
litre d’eau.
Dans le commerce, les objets échangés étant nettement plus lourd qu’un gramme et l’étalon
de masse constitué d’eau étant instable, on souhaite que l’étalon utilisé soit en métal d’une
masse 1000 fois plus élevée que le gramme : le kilogramme.
En 1799, le kilogramme est défini comme un étalon en platine. Ce n’est qu’en 1889 que le
kilogramme étalon est défini par la masse du Prototype International du Kilogramme.
Le PIK est constitué d’un alliage de 90 % de platine et de 10% d’iridium. Sa forme est
un cylindre de 39.17mm de hauteur et de diamètre.
Le PIK
Le PIK est conservé dans le Bureau International des Poids et Mesures, en France. Six copies
du PIK ont été données aux Etats membres pour servir d’étalons de masse nationaux.
En constatant que la masse du PIK varient au cours du temps le Comité International des
Poids et Mesures veut redéfinir le kilogramme comme une constante fondamentale, en 2005.
En 2011, la Conférence Générale des Poids et Mesures souhaite que le kilogramme soit
redéfini par la constante de Planck. Cette idée reste aujourd’hui en suspens.
Le kilogramme est un facteur important en mécanique. On peut chercher à minimiser la masse
d’un système pour qu’il soit le moins encombrant possible pour son transport et son utilisation
en modifiant par exemple ses matériaux et dimensions. On peut aussi utiliser la masse pour
effectuer des essais mécaniques comme le fluage : on encastre la partie supérieure d’un
système avec un bâti et on y accroche une masse sur sa partie inférieure à l’aide d’un fil. Au
cours du temps, le système se déforme plus ou moins en fonction de l’intensité de la masse
utilisée.

SECONDE
La seconde l’unité de base de temps du système international, noté s.
Son nom provient de l’expression latine « minutum secunda », qui signifiait littéralement
minute de second rang, c’est-à-dire seconde division de l’heure.
Au cours de l’Histoire, la seconde étalon a été définie de différentes manières afin de la rendre
la plus précise possible.
Elle a d’abord été donnée comme la fraction 1/86400 du jour solaire moyen. Cette durée est
proche de la période du battement du cœur d’un homme adulte au repos.
En 1956, elle a été basée sur la révolution de la Terre autour du Soleil et définie comme la
fraction 1/31 556 925, 9747 de l’année 1900.
En 1967, « la seconde est la durée de 9 192 631 770 périodes de la radiation correspondant à
la transition entre les niveaux hyperfins F=3 et F=4 de l’état fondamental S½ de l’atome de
césium 133 » selon la 13ème conférence générale des poids et mesures. En d’autres termes, la
seconde est un multiple de la période de l’onde émise par un atome de césium 133 lorsqu’un
de ses électrons change de niveau d’énergie.
Aujourd’hui, la seconde est exacte jusqu’à la 14ème décimale (10-14 ). La précision,
justesse et fiabilité, du Temps Atomique International (TAI) est principalement obtenue
grâce à des horloges atomiques à jet de Césium. Elles sont 100 000 fois plus grandes que
celle du temps des éphémérides (ancienne échelle utilisée).
Des recherches sont effectuées dans le but d’obtenir une seconde étalon encore plus précise.
On prévoit que d’ici 2020, la précision obtenue à l’aide de l’atome de césium sera dépassée
lorsque le meilleurs des atomes sélectionnés (strontium, mercure, calcium, ytterbium…) aura
été choisi. L’astronomie sera donc abandonnée pour se pencher sur l’atome.
La seconde est utilisée en mécanique pour déterminer la durée d’un phénomène ou son
évolution au cours du temps dans tous les domaines. Par exemple, on peut chauffer un acier à
une certaine température puis le maintenir à température constante pendant une durée
déterminée avant d’effectuer une trempe afin que l’austénitisation soit complète, donc que le
matériau soit homogène. On peut aussi se pencher sur les moteurs. On souhaite, en utilisant
un moteur, minimiser sa durée d’accélération; soit qu’il atteigne une vitesse constante voulue
le plus rapidement possible.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%