MOTEUR ASYNCHRONE

FCMN 10 avril 2003
PhG-Sciences
Fin du cours distribué en 1997
V- Couplage des récepteurs
La plaque signalétique d'un moteur triphasé porte les indications suivantes:
1,5 kW 220V/380V 6,2A/3,6A 1440 tr/min cos = 0,84
Ce sont les conditions normales de fonctionnement ( ou conditions nominales ) pour lesquelles
le rendement du moteur est généralement le plus élevé.
Signification de ces indications:
1,5 kW Puissance disponible sur l'arbre moteur ( c'est une puissance mécanique ).
220V/380V La plus petite des valeurs, ici 220V, indique la tension efficace aux
bornes d'un enroulement.
Pour ce moteur deux cas peuvent se présenter:
réseau 127V/220V implique un couplage en TRIANGLE
réseau 220V/380V implique un couplage en ETOILE.
6,2A/3,6A Intensité par phase couplage triangle /couplage étoile
Avec un réseau 127V/220V, l'intensité par phase est I = 6,2 A.
Avec un réseau 220V/380V, elle est alors I = ,3,6 A.
1440 tr/min Fréquence nominale de rotation
cos = 0,84 Facteur de puissance pour le fonctionnement nominale.
est le déphasage entre l'intensité traversant un enroulement et la tension à
ses bornes.
Application:
On dispose d'un réseau triphasé 220V/380V et du moteur précédent.
1- Quel doit être le couplage des enroulements ?
2- Quelle est la puissance électrique nominale absorbée par le moteur ?
3- Quel est son rendement nominal ?
VI- Puissance dissipée par effet Joule
Les trois enroulements d'un récepteur, ou d'un générateur, triphasé présente une résistance R cause
d'une dissipation de puissance par effet Joule.
La résistance r est mesurée entre deux bornes et diffère suivant le couplage des
enroulements.
1- Montage en étoile
La puissance dissipée par effet Joule est:
- pour chaque enroulement: RI²
- pour le système triphasé: PJ = 3 RI².
La résistance r mesurée entre deux bornes correspond à l'association de deux enroulements
en série: r = 2R d'où R =
Error!
Les pertes par effets Joule exprimé en fonction de r sont pour le couplage étoile: PJ =
Error!
rI²
2- Montage en triangle
La puissance dissipée par effet Joule est:
- pour chaque enroulement: RJ² =
Error!
RI2 avec J =
Error!
- pour le système triphasé: PJ = 3 RJ² = 3 R(
Error!
)2 = RI².
La résistance r mesurée entre deux bornes correspond à l'association d'un enroulement en
parallèle avec deux enroulement placés en série:
r =
Error!
d'où r =
Error!
soit r =
Error!
L'expression R en fonction de la résistance mesurée r est: R =
Error!
.
Les pertes par effets Joule exprimé en fonction de r sont pour le couplage triangle: PJ =
Error!
rI²

FCMN 10 avril 2003
PhG-Sciences
3- Conclusion
Quel que soit le mode de couplage, la puissance dissipée par effet Joule est donnée par la
relation: PJ =
Error!
rI² avec r: résistance mesurée entre deux bornes;
I: intensité efficace du courant en ligne.
Montage en étoile
Montage en triangle
Résistance
r (mesurée entre deux bornes)
2 R
Error!
R (d'un enroulement)
Error!
Error!
pour chaque enroulement
R.I2
R.J2
Perte Joule
3 R.I2
3 R.J2 = R.I2
pour le système triphasé
Error! rI²
Error! rI²
X- Lors d'un démarrage direct, la chute de tension non négligeable au niveau de l'alimentation et
l'absorption d'une puissance réactive élevée impose à EDF de fixer des limites.
Limites des puissances autorisées par EDF à un abonné B.T.
Locaux et nature
Puissance des moteurs (kW)
du réseau de distribution
Monophasé 230 V
Triphasé 400 V
Habitation
1,4
5,5
Autres:
- avec réseau aérien
3
11
- avec réseau souterrain
5,5
22
III- Mesure du glissement
1- Compte-tours
Si la mesure est de 1430 tr/min à 1 % et la différence de fréquence 70 tr/min, le glissement ne
sera déterminé qu'à
Error!
soit 20 %.
2- Mesure des courants rotoriques
Des courants sont induits dans un arbre métallique à la fréquence gf. Ils sont suffisants pour
donner à une aiguille N oscillations par minute. gf =
Error!
soit g =
Error!
3- Stroboscopie
V- Courbes caractéristiques
Ces courbes mettent en évidence les valeurs du couple nominal Tn et du courant nominal In
correspondant à la puissance utile nominale Pun.
L'allure de ces courbes permet de dégager les remarques suivantes:
g = f(Pu): le glissement augmente avec la charge tout en restant de faible valeur.
cos = f(Pu): le facteur de puissance s'améliore lorsque la charge augmente.
= f(Pu): le rendement passe par un maximum pour une charge égale à environ 0,9 Pu.
T = f(Pu): le couple utile est proportionnel à la charge
( la vitesse est pratiquement constante.
I = f(Pu): le courant absorbé croît avec la charge.

FCMN 10 avril 2003
PhG-Sciences
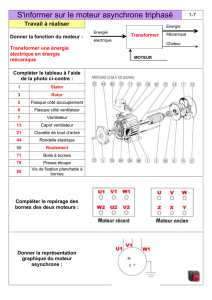
U1 V1 W1
U2 V2
W2

FCMN 10 avril 2003
PhG-Sciences
MOTEUR ASYNCHRONE
Le moteur asynchrone entre dans la composition de très nombreux équipements et, s'il n'en fallait
connaître qu'un seul, notre choix devrait porter sur celui-ci (80 % des moteurs électriques).
La plupart des moteurs entraînant les machines-outils sont des moteurs asynchrones triphasés dont
la puissance ne dépasse pas 1,5 kW. Des moteurs asynchrones monophasés sont utilisés pour ce
que l'on appelle le gros électroménager (machine à laver le linge et la vaisselle, réfrigérateur et
congélateur,...).
Les moteurs asynchrones sont robustes, faciles à construire et donc peu coûteux. Leur utilisation est
conseillée lorsque la fréquence de rotation du dispositif à entraîner ne doit pas être rigoureusement
constante.
La simplicité de leur démarrage facilite leur utilisation pour les usages industriels ou domestiques.
I- Moteur asynchrone triphasé. Organisation simplifiée.
Il comporte:
une partie magnétique feuilletée, constituée de tôles d'acier au silicium isolées entre elles
par oxydation naturelle ou par un vernis (les pertes par hystérésis et courant de Foucault dues
aux variations du courant dans les bobinages ne doivent pas dépasser 2,6 W/kg).
La partie fixe du circuit magnétique est montée dans la carcasse du moteur, le stator.
La partie mobile du circuit magnétique est fixée sur l'axe du moteur, le rotor.
une partie électrique, destinée à produire les phénomènes d'induction.
Les bobines du stator, logées et fixées dans des encoches isolées, constituent un ensemble
triphasé, bi- ou multipolaire, dont les trois entrées et les trois sorties sont raccordées à la
plaque à bornes.
Les bobinages du rotor peuvent être soit bobinés en triphasé étoile raccordés à trois bagues
transversales, soit constitués par des conducteurs longitudinaux dont les extrémités sont
reliées entre elles formant une cage, la cage d'écureuil.
une partie mécanique comprenant la carcasse, les flasques, le ventilateur, l'arbre monté
généralement sur roulement à billes, et souvent une bride pour permettre une liaison directe
avec un ensemble mécanique (pompe, ventilateur,...).
Remarque: Pour éviter les points morts, le rotor et le stator ont des nombres
d'encoches différents. Pour l'un des deux, elles sont inclinées pour que la
surface de recouvrement des encoches soit constante.
Moteur asynchrone triphasé à cage
Encore appelé moteur à rotor en court-circuit, il est le plus courant et le plus simple à fabriquer.
Il démarre directement et le sens de rotation s'inverse par simple inversion du courant dans une
phase. La vitesse dépend de la fréquence du réseau et du nombre de paires de pôles.
La puissance nominale n'est limitée que par la valeur du courant de démarrage Id (de quatre à
huit fois l'intensité nominale In.
Le couple est bon et permet le démarrage en charge.
Le rendement de l'ordre de 90 % est excellent mais le cos est faible à vide (0,1 à 0,2) alors
qu'il avoisine 0,9 en pleine charge: il ne doit donc pas fonctionner à vide.
L'absence de bagues limite considérablement la maintenance et est un des nombreux critères qui
justifie son emploi.
Moteur asynchrone triphasé à rotor bobiné

FCMN 10 avril 2003
PhG-Sciences
Le moteur à cage ne possède pas un couple important au démarrage et l'appel de courant est
élevé (4 à 8 fois In).
Pour pallier ces inconvénients, le moteur à rotor bobiné permet, au démarrage, d'insérer dans le
circuit rotorique des résistances qui ont pour effet d'augmenter le couple et de limiter l'appel de
courant.
Le bobinage rotorique constitue un ensemble triphasé monté en étoile. Le point neutre se trouve
à l'intérieur du bobinage et les trois entrée sont reliées à trois bagues transversales solidaires de
l'axe.
Des balais métallographitiques supportés par des porte-balais, identiques à ceux des machines à
courant continu, frottent sur les bagues en bronze.
Les balais sont reliés à trois bornes fixées sur la plaque à bornes.
Moteur asynchrone triphasé à double cage ou à encoches profondes
Le moteur à double cage est un moyen terme entre le moteur à cage simple et robuste mais
"ennuyeux" au démarrage, et le moteur à rotor bobiné plus compliqué par la présence de
bobines rotoriques, de bagues et de balais qui s'usent, et d'un système de démarrage encombrant
et coûteux.
Au démarrage, les courants induits se partagent dans les deux cages ou dans les deux barres. A
puissance égale, l'appel de courant est plus faible et le couple plus important. Le démarrage
direct autorise des charges importantes.
Moteur frein
Il se compose d'un moteur asynchrone auquel est adjoint un dispositif de freinage
électromagnétique disposé sur l'arbre à l'intérieur même du moteur.
A la mise en route l'électro-aimant du frein est excité et débloque les disques de freinage. Dés
que le courant d'alimentation est coupé, l'électro-aimant se désexcite, et le moteur est freiné.
Le moteur frein est très utilisé sur les machines automatiques, les ponts roulants, les monte-
charges, etc.
Freinage par contre-courant
Le freinage est obtenu par alimentation inversée du stator.
A l'ordre d'arrêt, le sens du courant à deux bornes du stator est inversé. Le moteur ralentit et
s'arrête. Pour éviter le fonctionnement en sens inverse, un contact temporisé coupe
l'alimentation.
1
/
5
100%