Chapitre 5 : TP - Cours

Elec. ALI idéal en régime linéaire
1
1
Electrocinétique et électronique
Chapitre 5 : TP - Cours
L’amplificateur linéaire intégré (ALI) idéal en régime linéaire
Un amplificateur linéaire intégré (ALI), encore appelé amplificateur opérationnel (ou AO ou ampli op)
est un circuit intégré : sur quelques mm2 de Silicium, on trouve quelques dizaines de transistors, résistances
et condensateurs miniatures. Cette miniaturisation des composants et des connexions a été rendue possible
par des techniques de fabrication élaborées.
Pour nous, un ALI (ampli op) sera une boîte noire permettant de faire des opérations électroniques de
traitement du signal : amplification, sommation, dérivation, intégration, etc…
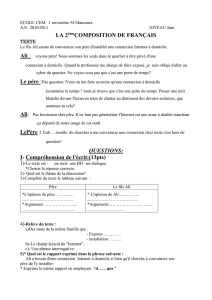
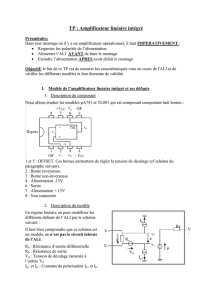
I / L’ALI idéal en régime linéaire
En général, on ne représente pas l’alimentation (Vcc), afin de simplifier les dessins, mais il ne faut
jamais oublier qu’elle est toujours indispensable au fonctionnement de l’ALI !
On note v+ et v- les potentiels électriques des deux entrées et ε la différence de potentiel entre les deux.
ALI idéal en régime linéaire :
0
0
vv
ii
De plus, iS(ALI) est quelconque, fixé par le reste du circuit ; cette énergie étant fournie par l’alim.
Attention : ceci n’est qu’une approximation, seulement valable dans des conditions raisonnables de
tension, d'intensité, de vitesse de variation, de fréquence, de stabilité (l’ALI peut fonctionner en régime
saturé), etc… Cf III / Les limites de l'ALI
Remarque : l’ALI idéal en régime linéaire est un composant linéaire pour lequel s’appliquent les lois de
l’électrocinétique linéaire (utilisation des complexes en sinusoïdal forcé, théorèmes de superposition, etc…)
Important : On pourra se rendre compte que l’ALI idéal en régime linéaire est très facile à étudier dès
lors que l'on écrit directement sur le montage :
vvetii :0
. L’essentiel du travail est alors déjà fait
sur le schéma !
Alim
Vcc -
Vcc +
Entrée -
inverseuse
Sortie
Entrée +
i -
i +
iS(ALI)
v -
v +

Elec. ALI idéal en régime linéaire
2
2
II / Montages usuels - Réalisation de fonctions linéaires
1°) Suiveur
Montage suiveur :
0surtout,et EES ivv
On a déjà vu l'utilisation du suiveur en TP :
Si on mesure à l’oscillo la tension aux bornes du géné, sans utiliser de suiveur, on est gêné par la
résistance interne r du GBF :
EGBF irteu )(
. En transitoire, où iE dépend du temps, on visualise un carré
déformé. En sinusoïdal forcé, en passant par la résonance où iE est maximum, l’amplitude de
GBF
u
diminue.
En utilisant un montage suiveur le fait que
0
E
i
permet d'éviter la chute de potentiel dans la résistance
interne du GBF et on visualise donc seulement la fem e(t) du GBF :
)(teuGBF
.
Rq 1 : La puissance d’entrée est nulle,
0. EEE ivP
, alors que la puissance de sortie,
SSS ivP .
, ne
l’est pas : elle est fournie par l’alim.
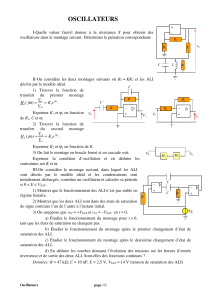
2°) Amplificateur inverseur
EES
E
Ev
R
R
iRv
R
v
i
1
2
2
1
Montage ampli inverseur :
1
2
R
R
v
v
E
S
et ce, qqs le dipôle en sortie du montage (attention : ici iE 0).
0
0
is
ve
vs
ie
ve
ve
0
0
is
ve
vs
ie
ve
ve
GBF
0
0
is
ve
vs
ie
0
0
+
+
+
R1
R2
0
ie
vs

Elec. ALI idéal en régime linéaire
3
3
3°) Amplificateur non-inverseur
On peut reconnaître un pont diviseur :
SE v
RR R
v
21
1
Montage ampli non-inverseur :
01
1
2 E
E
Siet
R
R
v
v
et ce, qqs le dipôle en sortie du montage.
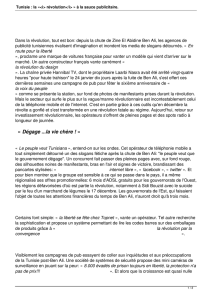
4°) Sommateur inverseur
2
2
1
1
0210
2
2
2
1
1
1)( R
v
R
v
RiiRv
R
v
i
R
v
iEE
EES
E
E
E
E
Montage sommateur inverseur :
2
2
1
1
0R
v
R
v
Rv EE
S
et ce, qqs le dipôle en sortie du montage.
Rq 1 :
vvvRRR EES 21210
Si
.
Rq 2 : ie1 0 et ie2 0.
5°) Dérivateur
0
0
is
ve
vs
ie
+
R1
R2
ve
vs
ve
ve
0
0
is
ve1
vs
ie1
0
0
+
R1
R0
0
vs
R2
ve2
ie2
ie1+ ie2
0
0
is
ve
vs
ie
0
0
+
C
R
0
vs
ie
q

Elec. ALI idéal en régime linéaire
4
4
dt
dv
RCiRv
dt
dv
C
dt
dq
iE
ES
E
E
Montage dérivateur :
dt
dv
RCvE
S
et ce, qqs le dipôle en sortie du montage.
Rq : En fait, ce montage n'est pas si génial que ça. En effet, si on écrit ce qui se passe en sinusoïdal
forcé, on trouve :
RC
V
V
HHjRC
V
V
H
E
S
E
S
. Les hautes fréquences sont donc excessivement
amplifiées (par exemples les parasites HF).
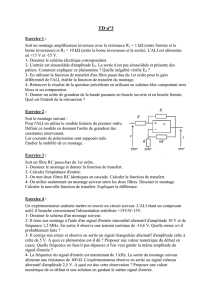
6°) Intégrateur
cstedtv
RC
dti
CC
q
v
R
v
iEES
E
E 11
Montage intégrateur :
cstedtv
RC
vES
1
et ce, qqs le dipôle en sortie du montage.
Rq : En fait, ce montage n'est pas si génial que ça. En effet, si on écrit ce qui se passe en sinusoïdal
forcé, on trouve :
0
11
RCV
V
HH
jRCV
V
H
E
S
E
S
. Les basses fréquences sont donc excessivement
amplifiées (par exemples les composantes continues).
III / Les limites de l’ALI
1°) Saturation en tension
En fait, vS est limité par une valeur de saturation :
satSsat VvV
(où Vsat est de l’ordre de la tension
d’alim ~ 15 V).
Exemple : ampli non-inverseur
12 RR
avec
VoltsVoùtVv EEE 10)cos(
Désolé, le dessin n'est pas très beau…
0
0
is
ve
vs
ie
0
0
+
C
R
0
vs
ie
q
t
ve
vs attendu
vs saturé

Elec. ALI idéal en régime linéaire
5
5
2°) Saturation en courant
Le courant de sortie de l'ALI est limité par une valeur de saturation :
satALIS Ii
)(
(où Isat ~ 20 mA).
3°) Vitesse de balayage (slew-rate)
Le signal de sortie ne peut pas varier infiniment rapidement et ne peut donc suivre les variations trop
rapides de la tension d’entrée :
dt
dvS
de l’ordre de 0,5 V.s-1.
On verra en TP de PSI qu'un inconvénient majeur dû à cette limite en vitesse de balayage est la
triangularisation des sinusoïdes de fréquence trop élevée.
4°) ALI non-idéal (réel) en régime linéaire
En fait, dans un ALI réel, on a :
0
:et0 S
vvv
où 0 est le gain fini de l’ALI (très
grand ~ 105, mais pas infini) et est très petite, mais pas nulle.
(ALI idéal : = 0 et 0 = )
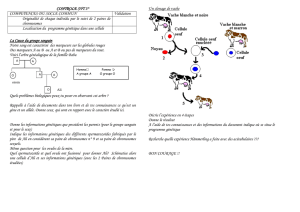
5°) Stabilité
Qu'est-ce que la stabilité d'un équilibre mécanique ? A partir d'une position d'équilibre, si un courant d'air
déplace le système dans une direction donnée, on regarde si le système à tendance à revenir à l'équilibre (exemple :
une règle tenue par le haut), l'équilibre est alors stable ; ou si le système à tendance à s'écarter encore plus de
l'équilibre (exemple : une règle tenue par le bas), l'équilibre est alors instable.
Si la sortie est reliée à l’entrée inverseuse :
vs
vs
Vsat -
Vsat +
t
Bouts de droites de pente
+
Dipôle
V-
Vs
V+
 6
7
8
6
7
8
1
/
8
100%