Statique du voilier

Chapter 1
Statique du voilier
1.1 Généralités
Quand un voilier marche bien, il avance à vitesse constante. D?après la première
loi de newton, le ?principe d?inertie?, la somme des forces agissants sur le bateau
s?annulent. On peut donc travailler sur des problèmes de statique pour décrire
l?équilibre d?un voilier avançant à vitesse constante.
Explication : quand on est en voiture sur l?autoroute, on ne ressent aucune
force sur nous (à part dans les virages?) En fermant les yeux, il est donc difficile
de dire si on avance ou pas. Sur un bateau c?est pareil. C?est le principe
d?inertie.
1.2 Forces principales du voilier
•Poussée vélique (poussée, composante de dérive)
•Force anti-dérive ( trainée, composante anti dérive)
•Forces de trainées
•Force de rappel (équipage et/ou quille)
•L?addition de toutes ces forces donne 0, quand le bateau avance à vitesse
constante.
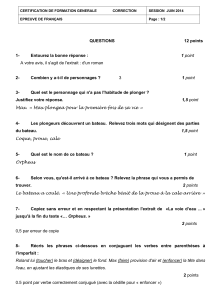
Nous avons ici rassemblé les forces de trainée sur la dérive.
•Le point d’application des forces d’antidérive, est le centre du repère. Tout
est aligné, le bateau est neutre.
•Le point d?application des forces d?antidérive, est le centre du repère.
Tout est aligné, le bateau est neutre.
1

2CHAPTER 1. STATIQUE DU VOILIER
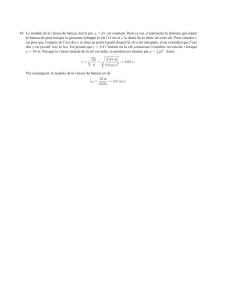
Figure 1.1: Schéma de principe simplifié avec une seule voile (typiquement le
laser):

1.3. ROTATIONS, MOMENTS 3
1.3 Rotations, moments
Un bateau naviguant à vitesse constante satisfait donc le principe d?inertie.
Mais comment y arriver (comment le rendre stable pour aller vite? et ne pas
tomber)? Nous allons ici comprendre mathématiquement (et oui?) comment
l?équilibre d?un bateau se fait.
1.4 Axe de rotation
Chaque voilier (ou bateau dans le cas général) à des rotations sous 3 axes :
•Le roulis (la gîte, c?est ce qui va nous intéresser)
•Le tanguage (ce qui arrive face aux vagues par exemple)
•Le lacet (le cap)
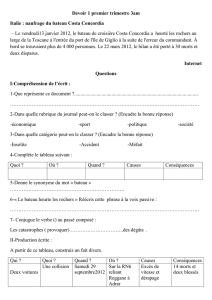
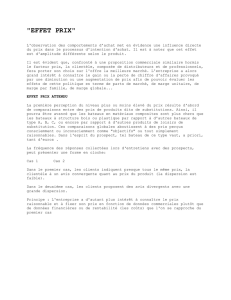
Ici le schéma d?un IMOCA dessiné numériquement, muni d?un repère à 3
axes centré sur le centre de gravité de la coque (c?est en ce point que le bateau
va faire ses rotations). Avec une bonne approximation, à l?arrêt, ou dans le cas
d?un mouvement constant, le bateau est en liaison rotule avec l?eau. 3 degrés
de libertés donc 3 ?moments? potentiels.
1.5 Le Moment d?une force (ou le couple)
Pour continuer, introduisons la notion de moment. Un moment c?est une force
?multiplié? par une distance. Dès qu?il y a une rotation, il y a un moment.
M(o) = ~
D∧~
F(1.1)
Autrement dit, le moment d?une force en un point o, est égal à la force
produit vectoriel la distance entre le point d?application de la force et le point
où l?ont veut calculer le moment de cette force.
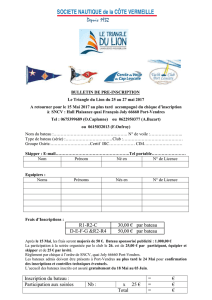
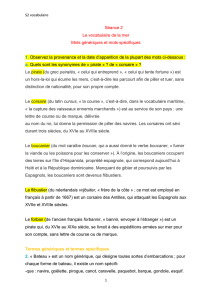
Exemple : Opti-mister au rappel :
On suppose que l?axe de rotation du bateau se situe au point où la dérive
sort (en réalité ce n?est pas le cas). Le point de rotation passe par le centre de
masse du volume de la coque immergée.
Nous avons appelé λ, le vecteur moment.
~
M1(o) = ~
d1∧~
F1=~
λP ourlaforceF 1.~
M2(o) = ~
d2∧~
F2=−~
λP ourlaforceF 2.
(1.2)
Le vecteur λsera dans la direction de l?axe des x, l?axe de gîte du bateau.
L?addition des 2 moments donne 0 car le bateau est à l?équilibre.
Si le bateau était sur la point de chavirer, quel norme de quel moment serait
la plus grande?
Réponse : Le moment ~
M1(o)

4CHAPTER 1. STATIQUE DU VOILIER
Figure 1.2: Schéma imoca

1.5. LE MOMENT D?UNE FORCE (OU LE COUPLE) 5
Figure 1.3: Optimist
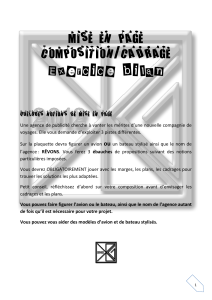
1.5.1 La prise de quête :
Une fois que l’on a compris la notion de moment, on peut l’appliquer à tous les
réglages du bateau !
Pour un bateau mou :
Ici, on va s’intéresser aux forces les plus conséquentes, c’est à dire les forces
rouges. Leurs points d’applications sont désaxés. Ici, on va s?intéresser aux
forces les plus conséquentes, c?est à dire les forces rouges. Leurs points d?applications
sont désaxés. Prenons les composante horizontale sur le schéma, on négligera la
composante verticale par rapport à celles-ci.
Le moment de la force exercée sur la voile au centre de la dérive, axe de
rotation du bateau, orienté vers nous, est égal au produit vectoriel de la force
par la distance d (voir le schéma).
1
/
5
100%