£ ¢ ¡ £ ¢ ¡ - Beechannels

Niveau : première Fiche méthode : axe de symétrie F. Demoulin
On rapporte le plan à un repère orthogonal ¡O;−→
ı,−→
¢. Soient ∆la droite d’équation x=aet fune
fonction définie sur Df. On note Cfsa courbe représentative dans ce repère.
1 Rappels de cours
On donne trois propriétés permettant de prouver qu’une droite est axe de symétrie d’une courbe.
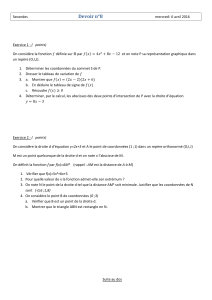
Rappel : formules de changement de repère par translation.
Dans le repère ¡O;−→
ı,−→
¢, soient A(a;b) et M(x;y). Dans le repère ¡A;−→
ı,−→
¢, si on note (X;Y) les
coordonnées de M, alors :
x=X+a
y=Y+b
~
i
~
j
O
~
i
~
j
A
a
b
M
X
Y
x
y×
Propriété 1.1 Soit Aun point de ∆(par exemple le point de coordonnées (a; 0)). Dans le repère
orthogonal ¡A;−→
ı,−→
¢,Cfest la courbe représentative d’une certaine fonction get a donc pour
équation Y=g(X).
La droite ∆(x=a) est axe de symétrie de Cfsi, et seulement si, gest paire.
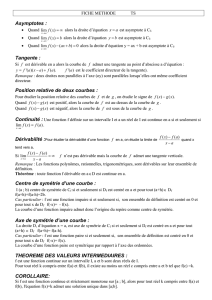
Propriété 1.2 La droite ∆(x=a) est axe de symétrie de Cfsi, et seulement si, pour tout xde Df:
(i) (2a−x)∈Df.
(ii) f(2a−x)=f(x).
~
i
~
j
O
Cf
∆
× ××
a
x2a−x
f(x)=f(2a−x)M M′
H
1

Niveau : première Fiche méthode : axe de symétrie F. Demoulin
Propriété 1.3 La droite ∆(x=a) est axe de symétrie de Cfsi, et seulement si, pour tout réel htel
que (a+h)∈Df:
(i) (a−h)∈Df.
(ii) f(a+h)=f(a−h).
2 Méthodes et exemples
2.1 Première méthode : changement de repère
Point méthode 1 Pour montrer que la droite ∆d’équation x=aest axe de symétrie de C:
➀on établit les formules de changement de repère ;
➁on donne l’équation de Cdans le nouveau repère en la mettant sous la forme Y=g(X) ;
➂on montre que la fonction gest paire.
Exemple. Soit fla fonction définie sur Rpar f(x)=x2+2x−3. Montrer que la droite ∆d’équation
x= −1 est axe de symétrie de Cf.
➀On commence par établir les formules de changement de repère.
Dans un repère orthogonal ¡O;−→
ı,−→
¢, soient Ale point de ∆de coordonnées (−1; 0) et Mle point
de coordonnées (x;y). On note (X;Y) les coordonnées de Mdans le repère ¡A;−→
ı,−→
¢. Les formules
de changement de repère sont, d’après le rappel :
x=X−1
y=Y
➁On donne ensuite l’équation de Cfdans le repère ¡A;−→
ı,−→
¢.
On a :
M∈Cf
⇐⇒ y=f(x)
⇐⇒ Y=f(X−1)
⇐⇒ Y=(X−1)2+2(X−1) −3
⇐⇒ Y=X2−4
Dans le repère ¡A;−→
ı,−→
¢, l’équation de Cfest Y=g(X) où g:X7−→ X2−4.
➂On montre enfin que g est paire.
gest définie sur Rdonc Dgest centré en 0.
Pour tout Xde R,g(−X)=(−X)2−4=X2−4=g(X).
gest donc paire.
D’après la propriété 1.1, la droite ∆d’équation x= −1 est donc axe de symétrie de Cf.
2.2 Deuxième méthode
Point méthode 2 Pour montrer que la droite ∆d’équation x=aest axe de symétrie de C:
➀on vérifie que (2a−x)∈Df;
➁on montre que f(2a−x)=f(x).
2

Niveau : première Fiche méthode : axe de symétrie F. Demoulin
Exemple. Soit fla fonction définie sur Rpar f(x)= −3x2+4x+1. Montrer que la droite ∆d’équation
x=2
3est axe de symétrie de Cf.
➀On commence par vérifier que ¡4
3−x¢∈Df.
fest définie sur Ret, pour tout xde R,¡4
3−x¢∈R.
➁On montre ensuite que f ¡4
3−x¢=f(x).
Pour tout xde R:
f¡4
3−x¢= −3¡4
3−x¢2+4¡4
3−x¢+1
= −3¡16
9−8
3x+x2¢+16
3−4x+1
= −3x2+4x+1
=f(x)
D’après la propriété 1.2, la droite ∆d’équation x=2
3est donc axe de symétrie de Cf.
2.3 Troisième méthode
Point méthode 3 Pour montrer que la droite ∆d’équation x=aest axe de symétrie de C:
➀on vérifie que Dfest centré en a;
➁on montre que f(a+h)=f(a−h).
Exemple. Soit fla fonction définie sur Rpar f(x)=sin x+1
2cos2x. Montrer que la droite ∆d’équa-
tion x=π
2est axe de symétrie de Cf.
➀On commence par vérifier que D fest centré en π
2.
fest définie sur Ret, pour tout hde Rtel que ¡π
2+h¢∈R,¡π
2−h¢∈Rdonc Dfest centré en π
2.
➁On montre ensuite que f ¡π
2−h¢=f¡π
2+h¢.
Pour tout hde R:Angles associés :
sin¡π
2−x¢=sin¡π
2+x¢
cos(π−x)=cos(π+x).
f¡π
2−h¢=sin¡π
2−h¢+1
2cos2¡π
2−h¢
=sin¡π
2+h¢+1
2cos(π−2h)
=sin¡π
2+h¢+1
2cos(π+2h)
=sin¡π
2+h¢1
2cos2¡π
2+h¢
=f¡π
2+h¢
D’après la propriété 1.3, la droite ∆d’équation x=π
2est donc axe de symétrie de Cf.
3
1
/
3
100%