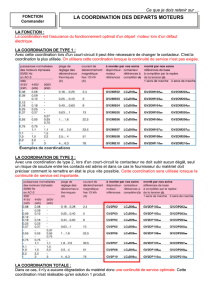
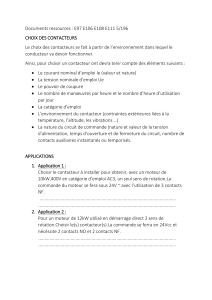
LES COMPOSANTS D’UN DEPART
MOTEUR (Partie puissance)
Le sectionneur porte-fusible
I Rôle du sectionneur porte-fusibles
C’est un appareil électrique de protection capable d’ouvrir ou de fermer un circuit sous
l’action manuelle d’un technicien afin d’isoler les circuits électriques d’alimentation du
réseau.
Le sectionneur porte-fusibles a deux fonctions :
– La fonction consignation-isolement réalisée par le sectionneur.
– La fonction complémentaire de protection par fusible est souvent ajoutée. Cette fonction
protège la ligne d’alimentation.
Sa manœuvre s’effectue toujours à vide.
II Différentes fonctions du sectionneur
A / Les contacts principaux
Ils permettent d’assurer l’isolement de la machine par rapport au réseau ce qui est obligatoire
avant toutes interventions.
B / Contacts ou pôles de précoupures

Les contacts, ou pôles de précoupures permettent d’isoler le circuit de commande avant ceux
de puissances.
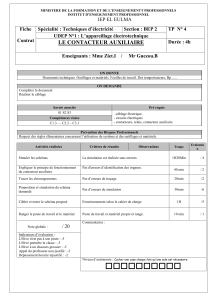
III Interrupteur sectionneur à commande rotative
Les interrupteurs-sectionneurs satisfont les applications d’interrupteurs par la fermeture et la
coupure en charge de circuits inductifs, ceci pour des manœuvres fréquentes.
Ils peuvent commander directement les moteurs.

Ils satisfont les applications de sectionneurs par :
– la coupure pleinement apparente (la poignée ne peut indiquer la position “ouvert” que si
tous les contacts sont effectivement ouverts et séparés par la distance de sectionnement
convenable).
– la possibilité de cadenasser les poignées en position d’ouverture.
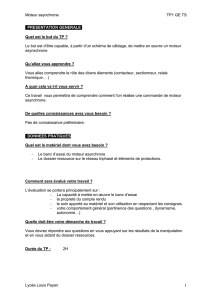
Le disjoncteur magnétothermique.
Les disjoncteurs magnétothermiques assurent, en plus de la
protection contre les courts-circuits, une protection contre les surcharges, à l’instar d’un relais
thermiques.
Ils remplacent dans les circuits de départ moiteur, l’association de fusibles de classe aM
(accompagnement moteur) et d’un relais thermique.
Lors d’une coupure de circuit, après correction du défaut, le disjoncteur est réarmé
manuellement et est prêt à fonctionner de nouveau.

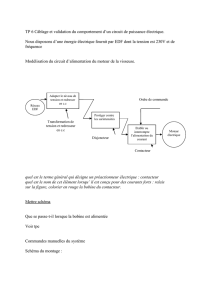
Choix d'un sectionneur (1)
Choix d'un sectionneur (2)
rique.
Les composants d'un départ moteur (partie commande).
o Le pupitre
o Le bouton poussoir
o Le voyant lumineux
o Code couleur des voyants et boutons poussoirs
o Maintenance d’un bouton poussoir et d’un voyant
Les composants d'un départ moteur (partie puissance).
o Le sectionneur porte-fusible.
o Le disjoncteur magnétothermique.

o Le contacteur
o Le relais thermique
o Constitution d’un départ moteur
o Le moteur asynchrone.
o Le moteur asynchrone : Puissance et rendement
o Maintenance : Contrôle d’un moteur asynchrone
o La plaque signalétique
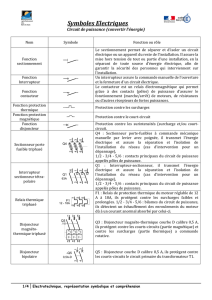
o Les symboles électrotechniques
o Le Moteur Asynchrone Triphasé (MAS)
10 questions10 min
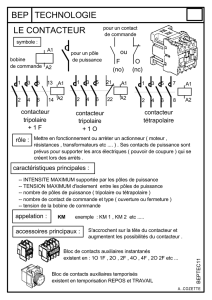
Le contacteur
Le pré-actionneur est chargé d’alimenter l’actionneur en énergie de puissance en fonction des
consignes opératives reçues de la partie commande. Suivant la nature de l’énergie, le
préactionneur est:
◊ un contacteur pour l’énergie électrique
◊ un distributeur pour les énergies pneumatique et hydraulique.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
1
/
38
100%