TP
Asservissement de position d'un moteur a courant
continu
1 Objectifs
Analyse d'un asservissement de position d'un moteur a courant continu.
Pour toutes les parties qui suivent, vous devrez :
| Realiser une etude theorique prealable avant le deroulement du TP (preparation) ;
| E ectuer les diverses manipulations ;
| Comparer, en justi ant, les resultats experimentaux et ceux que prevoit la theorie
2 Presentation du procede
Il s'agit d'un ch^assis constitue de deux sous-ensembles :
| une platine supportant l'ensemble moto-reducteur, dynamo-tachymetrique et les po-
tentiometres d'a

chage et de recopie de la position,
| une platine permettant le c^ablage de la manipulation.
Chaque element est decrit de maniere plus detaillee dans ce qui suit.
1.
Platine de c^ablage :
Cette platine comporte les di erents blocs necessaires a la realisation d'un asservis-
sement de vitesse ou de position (la gure 1).
Le bloc "Comparateur + preampli cateur" permet de realiser l'asservissement
desire. Le gain
A
=
G
1
G
2 permet de choisir le gain du correcteur.
G
1 prend
les valeurs 1, 10 ou 100, et
G
2 varie de 0 a 10. Le bloc "ampli cateur" de puissance
permet le raccordement de la partie contr^olee (courants faibles) a la partie moteur
necessitant des courants plus forts.
Le moteur utilise est un moteur a courant continu dont les caracteristiques tech-
niques sont resumees dans la partie suivante. Ce moteur est couple directement a une
dynamo-tachymetrique delivrant une tension proportionnelle a la vitesse de rotation
du moteur.
Attention
Un inverseur permet d'inserer une resistance additionnelle de 47 en serie
Figure1 { Platine de c^ablage
avec l'induit du moteur (attention au sens de cet interrupteur).
Un reducteur est place en bout de l'arbre moteur pour reduire la vitesse de rotation.
La position angulaire de l'arbre moteur est reperee par un potentiometre dont les
bornes sont presentes dans le bloc "Recopie de position".
Ne pas oublier d'alimen-
ter ce potentiometre lors de son utilisation
.
Le bloc "Conditionnement signal vitesse" permet de conditionner correctement le
signal delivre par la dynamo-tachymetrique. En asservissement de vitesse, l'inverseur
sera en position 1 (
V DT
1). Cet inverseur sera sur la position 0
;
005 lors du fonc-
tionnement en asservissement de position avec contre reaction tachymetrique, ce qui
permet d'ajuster
= 0
;
005
indicateur du potentiometre (Taux de contre reaction
tachymetrique).
Le bloc "Alimentation potentiometres" permet d'appliquer aux bornes des poten-
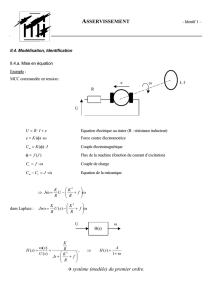
tiometres d'a
constante de couple
k
c
= 22
:
10

chage et de recopie une tension
U
0
= 20
V
avec des polarites a de nir
par l'utilisateur.
Le bloc "Consigne" permet de disposer d'une consigne reglable variant de +10
V
a
1
/
3
100%