Dérivation, Développements Limités et Intégration - Chapitre 1
Telechargé par
tamsir55

Chapitre 1
Dérivation, développements limités et intégration
1.1 Dérivation
1.1.1 Définition
Dans toute la suite Idésignera un intervalle du type
]a,b[,]−∞,b[,]a,+∞[.
Définition 1.1.1. (Dérivation, (Newton 1643-1727, Leibniz 1646-1716)).
Soit Iun intervalle non vide et f:]a,b[→Rune fonction. Soit x0un point de l’intervalle I. On dit que fest dérivable en
x0si et seulement si la fonction taux d’accroissement
τx0:x7→ f(x)−f(x0)
x−x0
admet une limite quand xtend vers x0. Cette limite est appelée nombre dérivé de fen x0, noté f0(x0)ou d f
dx (x0):
f0(x0) = d f
dx (x0) = lim
x→x0
f(x)−f(x0)
x−x0
=lim
x→x0
τx0(x).
Remarque 1.1.2. On se ramène souvent à prendre une limite en 0 en posant x=x0+h:
f0(x0) = lim
h→0τx0(x0+h) = lim
h→0
f(x0+h)−f(x0)
h.
La fonction fest dite dérivable sur l’intervalle Isi et seulement si elle est dérivable en tout point de I. On appelle dérivée
de fl’application
f0:I→R
x7→ f0(x).
1.1.2 Interprétation géométrique
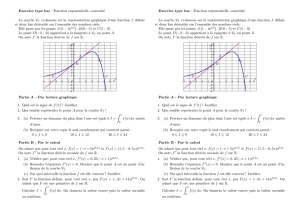
Le taux d’accroissement f(x)−f(x0)
x−x0est le coefficient directeur de la “corde” passant les points Mx0= (x0,f(x0)et Mx0+h=
(x0+h,f(x0+h)). Dire que fest dérivable en x0signifie géométriquement que le graphe de fadmet une tangente au point
(x0,f(x0)). Cette tangente est la droite limite des cordes (Mx0Mx0+h). Cette tangente a pour équation
Tx0,f(x0):y=f0(x0)(x−x0) + f(x0).
1

x=x0+h
x0
y=f(x0) + f0(x0)(x−x0)
=f(x0) + f0(x0)h
Graphe(f) = {(x,f(x)) |x∈I}
(x0,f(x0))
(x0+h,f(x0+h))
y=f(x0) + f(x0+h)−f(x0)
h(x−x0)
f(x0)
f(x0+h)
c
Contre-exemple 1.1.3. La fonction x7→ |x|n’est pas dérivable en 0. En effet
lim
h→0,h≥0|h|
h=h
h=1 et lim
h→0,h≤0|h|
h=h
h=−1
Son graphe n’admet pas de tangente en 0.
|x|
1.1.3 Interprétation physique
Si f(t)représente la position à l’instant td’un mobile sur un axe, le quotient f(t)−f(t0)
t−t0représente la vitesse moyenne du
mobile entre les temps tet t0alors que le nombre dérivée f0(t0)représente la vitesse moyenne du mobile au temps t0.
1.1.4 Développement limité à l’ordre 1
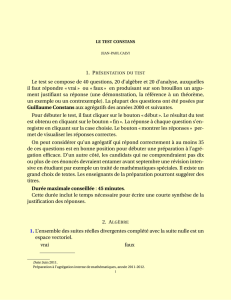
Dire que fest dérivable en x0de dérivée f0(x0)signifie qu’il existe une fonction “erreur” ε:]a,b[→Rtelle que pour tout
x∈]a,b[
f(x) = f(x0) + f0(x0)(x−x0)+(x−x0)ε(x)
avec limx→x0ε(x) = 0.
Le produit (x−x0)ε(x)représente l’erreur commise dans l’approximation de fpar le polynôme f(x0) + f0(x0)(x−x0).
Remarque 1.1.4. La fonction erreur εest tout simplement
ε:x7→ f(x)−f(x0)
x−x0−f0(x0)
x07→ 0.
L’écriture
f(x) = f(x0) + f0(x0)(x−x0)+(x−x0)ε(x)
est le développement limité à l’ordre 1 de fen x0.

x=x0+h
x0
(x0,f(x0))
(x0+h,f(x0+h))
erreur = (x−x0)ε(x)
(x0+h,f(x0) + f0(x0)h)
c
D’après ce qui précède, fadmet un développement limité à l’ordre 1 en x0si et seulement si fest dérivable en x0.
1.1.5 Opérations sur les dérivées
Soit fet gdeux fonctions dérivables sur un intervalle Iet à valeurs dans R.
1. La fonction f+gest dérivable et sa dérivée est la fonction
(f+g)0=f0+g0.
2. Le produit f g est dérivable et sa dérivée est la fonction
(f g)0=f0g+f g0.
3. Si de plus la fonction gne s’annule pas, alors la fonction 1
gest dérivable et sa dérivée est la fonction
1
g0=−g0
g2,
de même la fonction f
gest dérivable et sa dérivée est la fonction
f
g0=f0g−f g0
g2.
Proposition 1.1.5. (Dérivée des applications composées).
Soit u :]a,b[→]c,d[et f :]c,d[→Rdeux applications. La fonction composée
f◦u:x∈]a,b[→f(u(x))
est bien définie.
Soit x0∈]a,b[. Si u est dérivable en x0, si f est dérivable en u(x0)alors f ◦u est dérivable en x0et
(f◦u)0(x0) = f0(u(x0))u0(x0).

Remarque 1.1.6. Moyen mnémotechnique avec les notations de Leibniz : si l’on note F=f◦ualors
dF
dx =d f
du
du
dx .
Exemple 1.1.7. Considérons la fonction g:x7→ √x2+1. Cette fonction est la composée de
u:x7→ x2+1 et f:y7→ √y
leur dérivée sont
u0(x) = 2xet f0(y) = 1
√y
par application de la proposition précédente, la fonction gest dérivable et
g0(x) = 2x
√x2+1.
1.1.6 Fonction réciproque et dérivée
Si f:]a,b[→Rest une fonction strictement croissante ou strictement décroissante alors tout point de l’image de fadmet
un unique antécédent, dit autrement, toute valeur de fest atteinte une seule fois.
Contre-exemple 1.1.8. La fonction x7→ x2définie sur R2, le point 1 admet deux antécédents 1 et −1, mais cette fonction
n’est pas strictement monotone).
Sous l’hypothèse précédente, la fonction fest une bijection de ]a,b[sur son image f(]a,b[).
On peut alors définir son application réciproque f −1qui a une image de fassocie son unique antécédent
f:]a,b[→f(]a,b[)
x7→ f(x)
q q
f−1(y)←y
]a,b[←f(]a,b[) :f−1.
Graphe d’une application réciproque. Par définition
Graphe f={(x,f(x)) |x∈]a,b[,f(x)∈f(]a,b[)}
et
Graphe f−1={(y=f(x),f−1(y) = x)|x∈]a,b[,y=f(x)∈f(]a,b[)}
Ces graphes sont symétriques l’un par rapport à l’autre par rapport à la droite ∆:y=x.
Remarquons en effet que la symétrie s∆envoie le point (x,y)sur le point (y,x).
Exemple 1.1.9.
[0,+∞[→[0,+∞[
x→x2
√y←y

1.
1.
0
√.
(.)2
Exemple 1.1.10.
]−∞,+∞[→]0,+∞[
x→exp(x)
ln(y)←y
−2.−1.1.
−2.
−1.
1.
0
ln(.)
exp(.)
Exemple 1.1.11.
[−π
2,π
2]→[−1,1]
x→sin (x)
arcsin(y)←y
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%