IPSA Au321
1
Bognini Nguetta Moïse
Devoir de maison Matlab/Simulink
BOGNINI Nguetta
1/ Préparation (partie modélisation)
a) Donner les équations du mouvement d’un tel système dynamique (entrée u : soulèvement
de la route, sortie x : position de la caisse par rapport à la position d’équilibre).
Solution : 𝑴𝒙̈= 𝑫(𝒚̇ − 𝒙̇) + 𝑲(𝒚 − 𝒙)
𝒎𝒚̈= 𝑫(𝒙̇ − 𝒚̇) + 𝑲(𝒙 − 𝒚) + 𝒌(𝒖 − 𝒚)
b) Ecrire le système sous la forme générale d’un système mécanique : 𝑴 𝒒̈+ 𝑪(𝒒, 𝒒̇) = 𝑭
On part: 𝑴𝒙̈= 𝑫(𝒚̇ − 𝒙̇) + 𝑲(𝒚 − 𝒙)
𝒎𝒚̈= 𝑫(𝒙̇ − 𝒚̇) + 𝑲(𝒙 − 𝒚) + 𝒌(𝒖 − 𝒚)
3/ Simulation avec Simulink
a) Lancer Simulink. Créer un modèle Simulink (.mdl) (File New Model, ou en cliquant sur
l’icône correspondant).
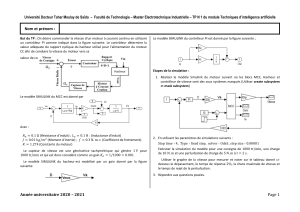
b) Créer un fichier script d’initialisation, dans lequel sont définis les paramètres du système
mécanique (m, M, k, K, D) et les conditions initiales. Puis réaliser une version du modèle
Simulink en utilisant quatre blocs intégrateur 1/s (Integrator de Continuous) et les blocs de
base de Simulink Gain, Sum, Product, Fcn , ….
L’entrée u est supposée être nulle entre 0 sec et 2 sec, puis constante de 5cm à partir de 2
secondes (utiliser le block Step pour simuler l’entrée), les conditions initiales étant nulles 𝑥 =
2 cm, 𝑦 = 0 m, 𝑥̇ = 𝑦̇ = 0. Mettre en sortie le bloc Scope pour visualiser l’évolution des
hauteurs des liquides.

IPSA Au321
2
Bognini Nguetta Moïse
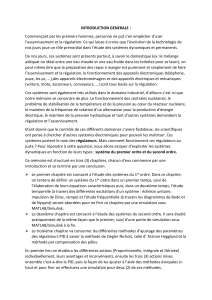
c) Modifier le modèle et le fichier script d’initialisation de façon à exécuter le modèle Simulink
sans ouvrir le modèle (commande sim), et tracer les résultats à partir du fichier
d’initialisation (Pour cela, ajouter d’abord des blocs ToWorkspace pour que les résultats de
simulation (variables x, dx, y, dy) apparaissent dans Workspace).

IPSA Au321
3
Bognini Nguetta Moïse
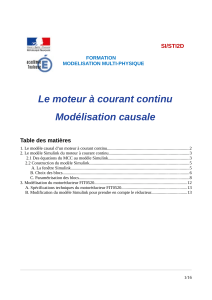
d) Subsystem : Regrouper la partie qui concerne le système hydraulique dans un bloc
Subsystem. (Sélectionner cette partie, cliquer à droite, puis cliquer sur create subsystem)
1
/
3
100%