énoncé

Spé ψ
ψψ
ψ 2015-2016 page 1/5 Devoir n°1
Spé ψ
ψψ
ψ 2015-2016 Devoir n°1
MÉCANIQUE DU POINT - ÉLECTROCINÉTIQUE
Rosetta est une mission spatiale de l'Agence spatiale européenne dont l'objectif principal est
de recueillir des données sur la composition du noyau de la comète 67P/Tchourioumov-
Guérassimenko et sur son comportement à l'approche du Soleil.
La sonde spatiale s'est placée en orbite autour de la comète puis, après une période
d'observation de plusieurs mois, a envoyé le 12 novembre 2014 Philae, un petit atterrisseur, se poser
sur sa surface pour analyser la composition de son sol et sa structure.
Données :
masse de la comète : m
com
= 1,0×10
13
kg ;
masse volumique de la comète : µ
com
= 400 kg⋅m
–3
;
période de rotation propre de la comète : T
com
= 12,4 h ;
constante gravitationnelle : G = 6,67×10
–11
U.S.I.;
distance de largage par rapport au centre : r
larg
= 22,5 km ;
masse de la sonde Rosetta : m
Ros
= 1500 kg ;
masse de l’atterrisseur Philae : m
Ph
= 98 kg ;
vitesse de la lumière dans le vide : c = 3,00×10
8
m⋅s
–1
.
La comète est modélisée par une boule homogène de masse m
com
et de masse volumique
µ
com
.
La distance entre un point M et le centre C de la comète est notée r = CM.
Champ gravitationnel de la comète
1) Déterminer le rayon r
com
de la boule équivalente à la comète.
2) On peut montrer que le champ gravitationnel
com
g
dû à la comète, s’écrit
2
com
r
com
m
g e
r
= − G
(pour
r
>
r
com
). Quelle est la dimension de la constante
G
?
3) Peut-on considérer le champ gravitationnel de la comète uniforme lors de la chute du mo-
dule Philae, suite à son largage ?
Rosetta autour de la comète
Avant de larguer l’atterrisseur Philae, la sonde Rosetta s’est rapprochée par paliers de la
comète. Le 10 septembre 2014, elle se situe sur une orbite circulaire de rayon r
1
= 30 km.
On définit le référentiel “ cométocentrique ” R
0
, dont l’origine est le centre C de la comète
et dont les axes pointent vers des étoiles lointaines considérées comme fixes. Il est considéré comme
galiléen.
4) Montrer que, dans le référentiel
R
0
, la trajectoire de la sonde est plane pendant la mise en
orbite.
5) Exprimer la vitesse
v
1
de la sonde en orbite circulaire de rayon
r
1
autour de la comète, en
fonction de
G
,
m
com
et
r
1
. Effectuer l’application numérique.
6) En déduire sa période
T
1
. Effectuer l’application numérique.

Spé ψ
ψψ
ψ 2015-2016 page 2/5 Devoir n°1
La sonde parcourt, à partir du 8 octobre 2014, une orbite elliptique avec un apocentre A
situé à la distance r
a
= r
max
= 20 km du centre C de la comète et un péricentre P caractérisé par
r
p
= r
min
= 10 km . Le 15 octobre, la propulsion est utilisée pour placer la sonde sur une orbite cir-
culaire de rayon r
p
= 10 km .
7) Représenter sur un schéma l’orbite elliptique, en faisant apparaître le centre
C
de la co-
mète, ainsi que les distances
r
a
et
r
p
. Exprimer l’énergie mécanique de la sonde sur l’orbite ellipti-
que en fonction de
r
a
et
r
p
.
8) Sur cette orbite, en déduire la vitesse
v
P
de Rosetta en
P
, en fonction de
G
,
m
com
,
r
a
et
r
p
.
Effectuer l’application numérique.
9) Pour placer la sonde en orbite circulaire de rayon
r
p
, la propulsion est utilisée lorsque Ro-
setta est au péricentre. Préciser numériquement la variation de vitesse
∆v
nécessaire.
La modification de la vitesse de la sonde est obtenue par éjection de gaz dans les tuyères des
propulseurs. En considérant que le mouvement de la sonde est rectiligne pendant la durée de
l’éjection, l’équation du mouvement , que l’on ne demande pas de retrouver, s’écrit
( )
(
)
(
)
e
dv t dm t
m t v
dt dt
= − où m(t) est la masse totale de la sonde, carburant compris, à l’instant t, v
sa vitesse à cet instant et v
e
la vitesse d’éjection des gaz supposée constante.
10) Établir l’expression de la masse
∆m
de carburant nécessaire pour obtenir la variation
∆v
de vitesse, en fonction de
v
e
,
∆v
et
m
CIRC
la masse totale de la sonde sur sa trajectoire circulaire.
Trajectoire de Philae
Approche numérique de l’équation du mouvement
On étudie la chute libre de l’atterrisseur Philae, dans un référentiel dont l’origine est le
centre O de la comète et qui tourne avec Rosetta, de sorte que le vecteur
r
e
pointe constamment
vers l’atterrisseur (accélération
2
2
r
d r
a e
dt
=
). Ce référentiel peut être considéré comme galiléen.
11) Établir l’équation du mouvement de l’atterrisseur Philae, une fois séparé de Rosetta, en
projection sur l’axe radial.
Cette équation peut être résolue numériquement. Une partie du programme de résolution de
cette équation par la méthode d’Euler est donnée ci-après, la déclaration des variables r0 et vr0
étant supposée déjà effectuée. De plus, dt et nbdt correspondent respectivement au pas de temps et
au nombre de pas de temps de la simulation.
1 def equadiff(r, vr) :
2 gm = (6.67e-11)*1e+13
3 return ............. #à compléter
4 def Euler ( dt , nbdt ) :
5 r=[r0] #condition init . sur l’a distance
6 vr=[vr0] #condition init . sur la vitesse
7 for i in range( nbdt) :
8 vr.append(vr[i] + .............. ) # compléter
9 r.append(r[i] + ..............) # compléter
10 return r
12) Écrire les lignes 3, 8 et 9 à compléter dans le code précédent permettant d’effectuer une
résolution de l’équation différentielle précédente par la méthode d’Euler.
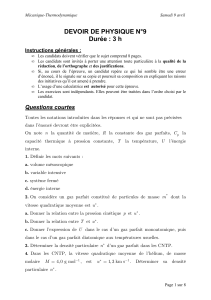
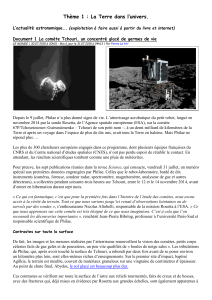
L’évolution temporelle de la distance r est représentée sur la figure 1, à partir de la distance
initiale r
(
t
= 0) =
r
larg
, pour différentes vitesses verticales initiales
( )
0
0
dr
v t
dt
= =
.

Spé ψ
ψψ
ψ 2015-2016 page 3/5 Devoir n°1
figure 1 : Évolution temporelle de l’altitude pour différentes vitesses initiales :
a : v
0
= 0 m⋅s
–1
b : v
0
= –0,15 m⋅s
–1
c : v
0
= –0,30 m⋅s
–1
d : v
0
= –0,45 m⋅s
–1
e : v
0
= –0,60 m⋅s
–1
f : v
0
= –0,75 m⋅s
–1
g : v
0
= –0,90 m⋅s
–1
h : v
0
= –1,05 m⋅s
–1
i : v
0
= –1,20 m⋅s
–1
13) Déterminer la durée τ
0
de la
chute de Philae s’il est abandonné par Ro-
setta avec une vitesse verticale nulle.
La durée réelle de la chute est τ ≈ 7h.. En
déduire la vitesse verticale initiale com-
muniquée à l’atterrisseur.
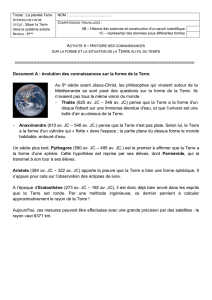
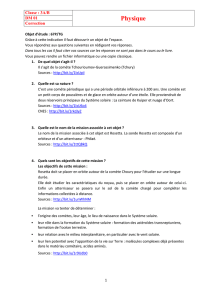
Différentes trajectoires de phase sont re-
présentées sur la figure 2, en fonction de
la vitesse verticale initiale.
14) Déterminer, par lecture graphi-
que, la vitesse verticale atteinte par Philae
au moment du contact avec la comète.
Approche énergétique
L’objectif est de retrouver la vitesse atteinte par l’atterrisseur au moment du contact avec la
comète.
abcde
g
h
i
de fi
g
f
figure 2
: Trajectoires de phase pour
différentes vitesses initiales

Spé ψ
ψψ
ψ 2015-2016 page 4/5 Devoir n°1
15) Lors de la chute de Philae, préciser comment évolue l’énergie mécanique de
l’atterrisseur.
16) En déduire, littéralement puis numériquement, la vitesse atteinte par l’atterrisseur lors du
contact avec la comète.
Le rebond de Philae
Extrait du programme officiel concernant les « résolution de problème ».
Compétence Exemples de capacités associées
S’approprier le problème. Faire un schéma modèle.
Identifier les grandeurs physiques pertinentes, leur attribuer un symbole.
Évaluer quantitativement les grandeurs physiques inconnues et non précisées.
Relier le problème à une situation modèle connue.….
Etablir une stratégie de réso-
lution (analyser).
Décomposer le problème en des problèmes plus simples.
Commencer par une version simplifiée.
Expliciter la modélisation choisie (définition du système, …).
Déterminer et énoncer les lois physiques qui seront utilisées.…..
Mettre en œuvre la stratégie
(réaliser).
Mener la démarche jusqu’au bout afin de répondre explicitement à la question posée.
Savoir mener efficacement les calculs analytiques et la traduction numérique.
Utiliser l’analyse dimensionnelle.…
Avoir un regard critique sur
les résultats obtenus (valider).
S’assurer que l’on a répondu à la question posée.
Vérifier la pertinence du résultat trouvé, notamment en comparant avec des estimations ou
ordres de grandeurs connus.
Comparer le résultat obtenu avec le résultat d’une autre approche (mesure expérimentale
donnée ou déduite d’un document joint, simulation numérique, …).
Étudier des cas limites plus simples dont la solution est plus facilement vérifiable ou bien
déjà connue.…
Communiquer. Présenter la solution ou la rédiger, en en expliquant le raisonnement et les résultats.…
8h35 : l’atterrisseur est largué par le vaisseau mère Rosetta. Il chute vers son objectif durant
7 heures à la vitesse de 0,90 m.s
–1
.
15h34 : impact de l’atterrisseur sur le sol de la comète. Philippe Gaudon, chef de projet de la
mission Rosetta pour le CNES, est rassuré : « ce qui est incroyable, c’est la précision du minutage
de l’atterrissage, cela signifie que Philae doit être pratiquement au centre de l’ellipse visée. Et puis,
nous continuons à recevoir des données, donc il n’est pas sur le toit ! ».
Près de 5 minutes après le contact avec la surface, les caméras embarquées doivent com-
mencer à réaliser le panorama à 360° du paysage qui entoure Philae. Le moment est historique et
pourtant, progressivement, les visages radieux au centre de contrôle se contractent : les images re-
çues sont floues, et les données de puissance électrique des panneaux solaires reçues ici sont inco-
hérentes. Normalement, une fois Philae posé et ancré, les panneaux doivent être plus ou moins
éclairés selon leur orientation par rapport au Soleil, mais leur puissance électrique doit demeurer
stable. Or ce n’est pas du tout le cas et les courbes visibles sur les écrans montrent sans ambiguïté
que la puissance de tous les panneaux fluctue. Y a-t-il un problème électrique majeur ou
l’atterrisseur est-il encore en train de bouger ?
En fait, comme le laissaient craindre les tests effectués dans la nuit, le système propulsif à
gaz froid qui doit plaquer Philae au sol ne s’est pas activé et les harpons n’ont donc pas été déclen-
chés. Le robot a alors rebondi mais, les trois pieds du train d’atterrissage étant équipés d’absorbeurs
de chocs, sa vitesse a heureusement été divisée par deux. Deux heures d’angoisse et
d’incompréhension vont suivre…
17h25 : second impact. L’atterrisseur vient de toucher le sol à nouveau. Plus personne ne
sait où il se trouve.
Le lendemain, le centre de contrôle annonce dans la presse que Philae est remonté à près de
1 km d’altitude et finalement retombé à plus de 1 km de son premier point d’impact.
17 ) Sachant que la direction de chute de Philae depuis son largage faisait un angle de 15°
avec la verticale, et en supposant que le rebond de Philae s’est fait symétriquement à cette verticale
avec une division par deux de la norme de sa vitesse, justifier les valeurs numériques indiquées dans
le texte concernant ce rebond .

Spé ψ
ψψ
ψ 2015-2016 page 5/5 Devoir n°1
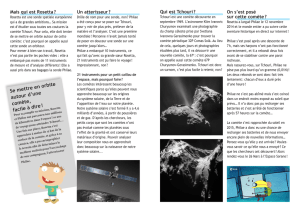
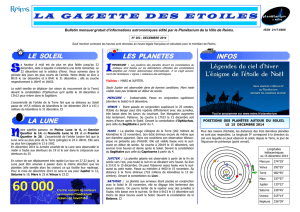
Une source de tension utilisée dans les circuits électroniques de Philae
Un montage à transistor, branché sur une résis-
tance de charge R
C
, peut être modélisée, en courant
constant, par le schéma ci-contre :
e
G
est la f.e.m. d’une source idéale de tension à
laquelle est relié le transistor. La source de courant J est
idéale mais son courant de court-circuit J
CC
dépend du
courant i
B
suivant la relation J
CC
= βi
B
(β est une cons-
tante positive).
18) On suppose dans cette question R
C
= ∞.
a) Exprimer v
S
en fonction de i
B
, β et R
E
.
b) Exprimer i
B
en fonction de e
G
, R
E
, r’ et β.
c) En déduire la valeur de v
S
en fonction de e
G
, R
E
, r’ et β. Comment peut-on appeler
v
S
dans ce cas ? On notera v
V
cette valeur.
d) Quel est le rôle de la résistance R
B
?
19) On suppose dans cette question R
C
= 0.
a) Exprimer i
S
en fonction de i
B
, β.
b) Exprimer i
B
en fonction de e
G
et r’.
c) En déduire la valeur de i
S
en fonction de e
G
, r’ et β. Comment peut-
on appeler i
S
dans ce cas ?
20) Un schéma équivalent du montage est représenté ci-contre :
a) Exprimer e
S
en fonction de β, R
E
; e
G
et r’.
b) Exprimer R
S
en fonction de β, R
E
et r’.
R
C
M
S
v
S
e
S
i
S
R
S
r
’
R
B
R
C
M
S
v
S
e
G
i
S
i
B
J
CC
=
β
i
B
R
E
J
E
1
/
5
100%