Fonctions logiques Et Circuits

CHAPITRE 2. Fonctions Logiques et Circuits
Des 0 et des 1…
1
2
2
C
CH
HA
AP
PI
IT
TR
RE
E
2
2
F
Fo
on
nc
ct
ti
io
on
ns
s
l
lo
og
gi
iq
qu
ue
es
s
E
Et
t
C
Ci
ir
rc
cu
ui
it
ts
s
D
De
es
s
0
0
e
et
t
d
de
es
s
1
1.
.
Faire simple, mais pas plus (A. Einstein)

CHAPITRE 2. Fonctions Logiques et Circuits
Des 0 et des 1…
2
L’objectif de ce chapitre est de montrer d’une part, que le traitement des
données par une Unité Arithmétique et Logique et leur stockage dans une
mémoire peut être entièrement décrit par des fonctions logiques très
simples(ET, OU, NON) et d’autre part, que ces fonctions peuvent être réalisées
par des circuits tout aussi simples. Avec des dispositifs très simples (transistors
par exemple) mais certainement en grand nombre, il est possible de réaliser
les fonctions de traitement (calcul) et de mémorisation d’un ordinateur.
Les technologies utilisées dans les ordinateurs actuels s’appuient toutes sur
des systèmes physiques ayant deux états stables : allumé – éteint, ouvert –
fermé, trou – bosse, etc. Mais pour se dégager des contraintes physiques de
ces systèmes, il est avantageux de travailler sur un modèle mathématique
commun comme la logique.
Après de brefs rappel sur l’algèbre de Boole, la première partie du chapitre
est consacrée à la conception de circuits permettant de réaliser des fonctions
logiques et arithmétiques. Il s’agit de la spécification d’une fonction à l’aide
d’une table de vérité (Boole), de la synthèse de la fonction (minterms) et
finalement sa réduction (Karnaugh). Ces étapes sont basées sur la logique
combinatoire.
La deuxième partie est dédiée à la conception de circuits mémoire en utilisant
les mêmes fonctions élémentaires logiques de base. La modélisation fait
intervenir la logique séquentielle et de manière plus générale la théorie des
automates finis (automates de Moore, Mealy)
A partir de ces circuits de traitement et de stockage, la troisième partie donne
un exemple d’architecture générale d’un microprocesseur très simple avec son
Unité Arithmétique et Logique et ses mémoires internes (les registres) et les
caractéristiques principales d’une « carte unité centrale ».

CHAPITRE 2. Fonctions Logiques et Circuits
Des 0 et des 1…
3
2.1 Algèbre de Boole & Logique.
George Boole a donné une base algébrique à la logique des propositions, une
proposition étant un énoncé qui peut être vrai (V) ou faux (F). Ces propositions
peuvent être reliées par des connecteurs pour élaborer de nouvelles propositions de
ce système binaire. Les connecteurs usuels sont le ¬ (non logique), le ∧ (et
logique) et le ∨ (ou logique). Par exemple, le connecteur ¬ appliqué à une
proposition vraie la rendra fausse. Le « robinet est ouvert » est une proposition p
qui peut prendre les deux valeurs V et F. La proposition q « l’eau coule » est une
proposition qui peut être vraie ou fausse. S’il y a deux robinets, alors la proposition
« l’eau coule » est à vrai si l’un ou l’autre des robinets est à vrai. Les variables
associées aux propositions pour manipuler celles-ci de manière plus abstraites sont
appelées des variables booléennes. Nous avons ainsi la formalisation
q=V lorsque p1=V ou p2=V et
q=F dans tous les autres cas.
La représentation algébrique donne q= p1 ∨ p2 à condition de définir totalement
(pour toutes les valeurs possibles des variables p1 et p2) l’opérateur ∨.
A l’instar des opérations arithmétiques qui sont définies à l’aide de tables
(d’addition, de multiplication, ..), un opérateur (connecteur) logique est défini par
une table dite de vérité. Pour des propositions p et q quelconques, la table de
vérité de l’opérateur logique ou est donnée en figure 2-1.
Longtemps après les travaux de
George Boole, Claude Shannon a fait
le lien entre les états ouvert et fermé
des relais électromagnétiques utilisés
dans les centraux téléphoniques et les
nombres binaires 0 et 1. Les
principaux résultats de l’algèbre vont
être rappelés avec la notation de Shannon. La même table de vérité devient alors,
en prenant la convention V=1 et F=0, les variables sont dénommées a et b.
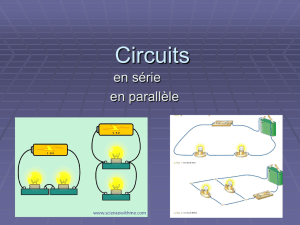
Intéressons nous plus particulièrement, l’ensemble étant dénombrable, à l’ensemble
de toutes les fonctions à deux variables. Il y a 16 fonctions de ce type, mais qui ne
sont évidemment pas toutes indépendantes les unes des autres.
a b f1
f2
f3
f4
f5
f6
f7
f8
f9
f10 f11 f12 f13 f14 f15 f16
0 0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1
1 0 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1
1 1 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1
Figure 2–2 Les fonctions logiques à 2 variables.
a
b
a∨b
1 1 1
1 0 1
0 1 1
0 0 0
p
q
p∨q
V V V
V F V
F V V
F F F
Figure
2
–
1
Table de vérité du
ou
logique.

CHAPITRE 2. Fonctions Logiques et Circuits
Des 0 et des 1…
4
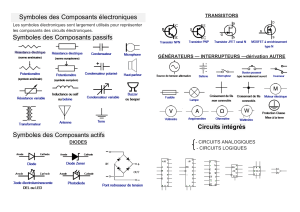
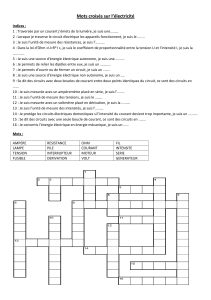
Parmi ces fonctions certaines sont plus intéressantes que d’autres : f1 ne présente
pas un intérêt majeur (elle produit la valeur 0 quelque soient les valeurs de a et b.
Par contre celles qui sont surlignées (f2, f7, f8, f8, f15,) sont plus utiles et certaines
mêmes fondamentales. Avec les notations en chiffres binaires, les opérateurs ∧ et ∨
sont remplacés par les signes . et +.
and a.b nand (a.b) nor (a+b) xor a ⊕ b or a +b
Figure 2–3 Les fonctions logiques usuelles à 2 variables.
De fait on peut montrer que toutes les fonctions logiques, quelles qu’elles soient,
peuvent être construites à partir de deux opérateurs (¬ et +) ou (¬ et .). Ce résultat
peut paraître curieux, mais effectivement toute opération faite par l’ordinateur, que
ce soit le calcul d’un logarithme ou un classement par ordre alphabétique, sera
traduite in fine en fonctions élémentaires de ce type.
Le complément d’une variable peut s’écrire de différentes manières :
¬a, que l’on lit non a, a barre, a étoile, a complémenté (et à tort a inversé). La
notation a prime ( a’ ) est une des plus usitée.
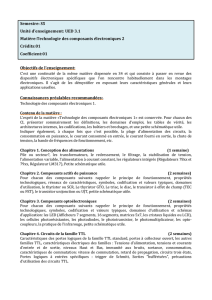
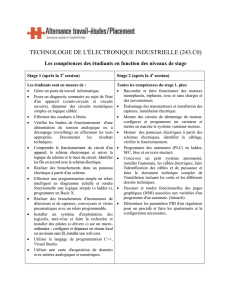
Les principaux résultats de l’algèbre de Boole sont résumés en figure ?2-4.
Figure 2–4 Algèbre de Boole : quelques résultats.
Le théorème fondamental est celui de De Morgan : il dit que le complément d’un
OU donne le ET des compléments, et inversement.
Théorème des constantes
a + 0 = a
a . 0
= 0
a + 1 = 1 a . 1 = a
Idempotence a + a = a a . a = a
Complémentation a + a= 1 a . a = 0
Commutativité a + b= b + a a . b= b . a
Distributivité sur OU a + (bc) = (a + b) . (a + c)
sur ET a . (b + c)= (a.b) + (a.c)
Associativité sur OU a + (b + c) = (a + b) + c = a + b + c
sur ET a .(b.c) = (a. b). c = a.b.c
Théorème de De Morgan baab += et baba=+
On notera aussi la relation définissant le ou exclusif.
bababa+=⊕
111
001
010
000
f9
ba
111
001
010
000
f9
ba
011
001
010
100
f2
ba
011
001
010
100
f2
ba
011
101
110
100
f8
ba
011
101
110
100
f8
ba
011
101
110
000
f7
ba
011
101
110
000
f7
ba
111
101
110
000
f15
ba
111
101
110
000
f15
ba

CHAPITRE 2. Fonctions Logiques et Circuits
Des 0 et des 1…
5
2.2 Logique Combinatoire.
Lorsque l’on passe à une réalisation pratique à l’aide de circuits électronique on
utilise parfois le symbolisme suivant dit des portes logiques (gates). Un ensemble
de portes connectées constitue un circuit logique.
2.2.1 Les circuits combinatoires
a.b a +b non a ⊕ b
Figure 2–5 Les circuits de base.
Le circuit de la figure 2-6 donne la réalisation d’un ou exclusif à l’aide de portes
et/ou et d’inverseurs.
Ce circuit correspond à la matérialisation de la relation bababa+=⊕ et est
appelé un logigramme.
Figure 2–6 Logigramme du XOR.
Ce type de réalisation est un circuit combinatoire : les sortie évoluent «
simultanément » avec les entrées au temps de propagations près.
Ces circuits se distinguent des circuits séquentiels par le fait que ces derniers ont
une capacité de mémorisation.
Les circuits combinatoires vont nous permettre d’aboutir à la construction d’une
Unité Arithmétique et Logique (UAL), composant qui dans un processeur effectue
les calculs sur les données. Les circuits séquentiels vont être à la base des circuits
de mémorisation et donc de la mémoire tout court.
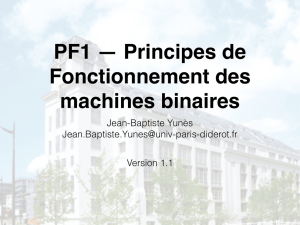
Circuits électroniques et transistors.
Un transistor est fondamentalement un composant
électronique réalisant une amplification de courant : le courant
dans le collecteur est proportionnel (gain β) au courant injecté
dans la base. Ce gain peut être de l’ordre de 100 mais peut
aussi prendre des valeurs très importantes. Le transistor utilisé
en mode amplificateur sert essentiellement dans les dispositifs
destinés au traitement analogique du signal : amplification,
filtrage, modulation, …
collecteur
base
émetteur
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
1
/
51
100%