BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L’INGÉNIEUR Session 2017

!"#!$ %&'(
))*+',-
))*+.
!""#$%%&'"""
()*+#&,
*-- --
$/0++1 " /%*#/*$2
.-

* "/3/4
*
+++"3+
5+./
*6++*(7.
8 *6+ !$0000000000000000000000.-1
3+*6$ +7+2
"*6+ !$+$/0+
+1 " /%*#/*$2
.--

2 !+/+"4+96!+"!
2 /3/4 ,3 &415
'6)72&.

56.7
9:&
2) ,&
,
'67
2)8 )6&
(;7 2'$
' , & ,
&:
–8<'=
– =
– >'=
–
2'*,
&&,8:8
./-
? @
&
A -@
A

2 %/#/+"#:6$/*+% 6+/#"#:% /0
;<3*+)"*++$/ +& *6$/ , & ,
&'
2'B&#
&
'
& 8 8 ,
) CD ,&
' ' ( ,
,'&'*
&
E',
'6-7E#8' 8
#,'
F& 9& G & G F F 3 H& (
1
411
111
411
-111
-411
/111
/411
<111
<411
/111
<-41
-41
411
-11 111
/11
111 "11
%11 411
-111
9-:',#8'
!+(4$+(9&
–'5=
–)*#
14 5I⋅
=
–'',
%=
–'*&'
/=
–3-9,
5I⋅
"1
&3-=
–83-
Tem CO-
,&'9
4 ⋅5−
.<-

2 !+ 6 '
NA−RJcabine
,#'
K "!" '
Npassagers
867
3
/#*# ' &
Ntrajets
* 6 7 &
'
2 /#*#
MRejets Jauto
3- *
'
MRejets Jascenseur
3-*
82 *# ,8
,,&
82 ) +"$//0
;<3*+)"*++$/ +& //#4 %/#" B&
2 H9 KH $#-- )
, 6 4! 4!7 K
&:
– & 8
< ⋅−
/11156&/7=
– +
6& ,8
(O ,
⃗
x)
(;7 ,
amax
'
&'
1×
2,
&:
="$ ⋅−-
9/:'&&
'689H3L7
2&'8
(O ,
⃗
xr)
6&(;7
*'
(L
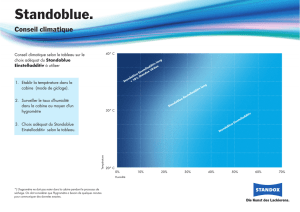
'2 / /*+! &
.4-
Q657
8
v6M
#
7
&
411
/111
<
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%