Batterie plomb AGM NP4-12 12V 4Ah YUASA

METZGER Mathieu
Batterie caméra
Batterie plomb AGM NP4-12 12V 4Ah YUASA
Réf. : AMP9217
Batterie au plomb étanche sans entretien
Utilisation aussi performante en charge permanente qu'en charge cyclique
Durée de vie en floating : 5 ans
En utilisation cyclique : 180 à 1200 cycles
Température d'utilisation * en charge : -15° C à + 50° C * en décharge : -20° C À + 60° C
Sorties : * de 0 à 12Ah = sortie cosse * de 17 à 130 Ah = sortie insert
Afin de satisfaire aux exigences de la norme NF-EN60950, Yuasa produit des batteries dont les bacs
sont conformes aux spécifications d'inflammabilité UL-94VO et sérigraphiés """FR"""(flamme
retardant)
33,40€

batterie motorisation principale:
Kit Batterie 24V 9Ah Li-Ion + Chargeur pour vélo electrique
Réf. : AML9108
Ce kit contient :
- 1 batterie 24V Li-Ion 9000mAh
- 1 chargeur secteur (se recharge en 6h)
- 1 rail de fixation
- 1 socle batterie
Temps de charge : 4-6h
Spécificité : Amovible (extraite en quelques secondes, verrouillée par clé) et totalement étanche
Garantie fabricant :1 an
305,00€

Projet: Robot G.I.P.N:
Structure du système:
Choix d'un robot avec des chenilles, (voir dessin volumique du produit non
fini).
Motorisation chenilles:
–PO: chenilles caoutchou
–Actioneurs: Moteur électrique (faire le choix d'un moteur adéquat)
–Préactioneurs: Variateur
–dialogue H/M: Policier / télécomande
Unité de traitement: carte électronique
Motorisation caméra de guidage (jaune sur le dessin)
- Actioneurs: mini moteur
–préactioneurs: variateur / transformateur
–unité de traitement: carte électronique
–dialogue H/M: Policier / télécomande
Motorisation caméra de repérage (non représentée sur le dessin)
même caractéristique que la caméra de guidage, sauf que le bras serai
articulé par un verin pneumatique (solution en cours de développement)
Beysang

Comme prévu, nous partons donc sur une architecture de type: chenilles +
armature paralepipédique avec deux roues, il ne reste plus qu'à organiser
l'intérieur de l'armature. Les moteurs: moteur chenilles: 2 moteurs
moteur bras: 2 moteurs (voir volumique)
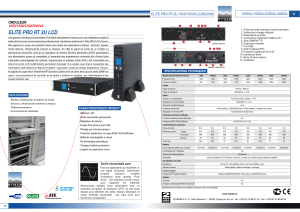
Schéma:
Moteurs
Réducteur à
revoi d'angle

Nous avons donc, dans le cas présent, deux moteurs, où son directement
integré les reducteurs et les renvoi d'angle à 90°.
Moteurs brushless BLDC
Ces moteurs à courant continu de technologie récente se différencient en inversant
bobines et aimants par rapport aux moteurs CC originels: le rotor est un aimant permanent
et le stator porte les bobines (comme dans un moteur pas-à-pas). Il n’y a donc pas besoin
de balais pour transmettre le courant électrique dans les bobines, d’où leur nom de
"brushless" (lit. sans brosses).
On les connaît bien en modélisme, où on les utilise pour les hélices des avions.
Il faut encore déterminer si l'on transmet la rotation aux roues arrières
(propultion) ou avants (traction), vu qu'il y a des chenilles et donc que les
roues arrières éffectuent le même travail que les roues avants, le choix est
moin subtile.
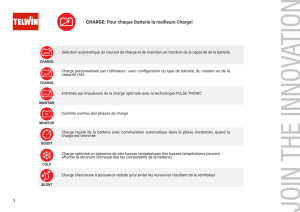
Caméra de repérage:
Objectif: Réaliser une prise en temps réel à 360°, pour cela nous avons
choisis ce type de caméra, elle sera au nombre de quatre, et une carte
électronique gerera la mise en commun des signaux pour retransmettre une
image à 360°.
Bras de
fixation
rotatible
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%