MACHINE DE DÉCHARGEMENT ET DE CHARGEMENT DE COMBUSTIBLE NUCLÉAIRE ÉLÉMENTS DE

TEC MDC corrigé V01.doc Page 1
sur 2
MACHINE DE DÉCHARGEMENT ET DE CHARGEMENT DE
COMBUSTIBLE NUCLÉAIRE
ÉLÉMENTS
DE
CORRECTION
Question 1 : Déterminer le gain B de l’enroulement (voir figure 6).
- le roulement sans glissement en A
3
de la roue (S
3
) sur le câble :
0)câble/S,A(V
33
r
r
= .
Le câble étant fixe par rapport au bâti grâce au blocage du compensateur de charge, on a :
0)S/S,A(V
033
r
r
= : on peut donc écrire : )SS(ΩAO)S/S,O(V
0333033
r
r
∧= , ce qui donne donc :
0030
x.Φy.Rz.z
r
&
r
r
&∧−= . On a donc : ΦRz
3
&
&=
-
le roulement sans glissement en A
1
de la roue (S
1
) sur le câble :
0)/,(
11
r
r
=câbleSAV
.
donc : )S/câble,A(V)S/S,A(V
01011
r
r
=.
Or :
010010111011011
z.θ.Rx.θy.R0)S/S(ΩOA)S/S,O(V)S/S,A(V
r
&
r
&
r
r
r
r
r
−=∧+=∧+=
Et : )S/S,B(V)S/câble,B(V)S/câble,A(V
0330301
r
r
r
== car le câble est inextensible et ne glisse
pas sur (S
3
).
Comme :
030030333033033
z..R.2x.y.R.20)S/S(AB)S/S,A(V)S/S,B(V
r
&
r
&
r
r
r
r
r
ϕ=ϕ∧−=Ω∧+=
, on en déduit
que :
ϕ=θ− &
&.R.2.R
31
et donc, avec l’expression précédente :
z.2θ.R
1
&
&=−
On a donc :
2
R
B1
−=
si les conditions initiales sont nulles.
Question 2 : Déterminer l’expression de J
E
moment d’inertie équivalent rapporté à l’arbre
moteur. Exprimer c
R
(t) en fonction de M
3
, M
4
, g, R
1
et δ
δδ
δ .
Soit (S) = {tambour (S
1
), poulie de renvoi (S
2
), poulie de moufle (S
3
), charge (S
4
), rotor (Rot),
câble et réducteur à arbre creux (Red)}
On sait que :
)R/d(ReT)R/câble(T)R/Rot(T)R/S(T)R/S(T)R/S(T)R/S(T)R/S(T 000040302010 ++++++=
De plus, on sait que
δ
θ
θ
M
&
&=
et donc :
M
11
θ
.
δ
.2
R
θ
.
2
R
z
&&
&−=−=
et
M
3
1
3
1
3
θ.
δ.R.2 R
θ.
R.2R
R
z
Φ&&
&
&−=−== ,
d’où :
[
]
2
2
M
1
2
1010101011
2
101
δ
θ
.Jθ.J)R/S(Ω.)R/S(Ω).R/S,G(I)R/S,G(V.M)R/S(T.2 &
&
rr
r==+=
0)R/S(T.2
02
=
[
]
)R/S(Ω.)R/S(Ω).R/S,O(I)R/O(V.M)R/S(T.2
030303303
2
303
r
r
r
+=
2
2
M
2
1
2
3
3
3
2
3
2
303
δ
θ
.
4
R
.
R
J
MΦ.Jz.M)R/S(T.2 &
&
&
+=+=
2
M
2
2
1
1
2
4014
2
404
θ.
δ
.
4
R
.Mz.M)R/S,G(V.M)R/S(T.2 &
&
r===
[
]
2
MR00010
θ.J)R/Rot(Ω.)R/Rot(Ω).R/Rot,O(I)R/Rot(T.2 &
r
r
==
0)R/câble(T.2
0
=
et
0)R/Red(T.2
0
=
soit
R
2
1
2
3
3
431
2
E
J
4
R
.
R
J
MMJ
δ
1
J+
+++=

TEC MDC corrigé V01.doc Page 2
sur 2
Question 3 : Par application du Théorème de l’Énergie Cinétique à l’ensemble matériel S en
mouvement par rapport à R
0
, exprimer c
R
(t) en fonction des paramètres utiles.
Théorème de l’énergie – cinétique appliqué à l’ensemble S :
z.g).MM(θ.C)S(P)R/Sext(Pθ.θ.J
dt
)R/S(dT
43MMint0MME
0
&
&&&& +−=+→==
on en déduit :
δ
.
2
R
.g).MM(Cθ.J
1
43MME
++=
&&
soit
δ
.
2
R
.g).MM(c 1
43R +=
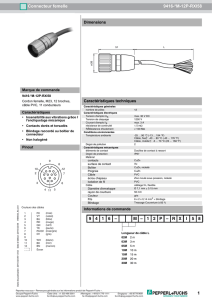
Question 4 : À partir de la courbe fournie figure 7 et des données ci-dessus, tracer la
courbe d’évolution du couple moteur c
M
(t) au cours du temps lors de la phase de montée de
la charge.
On a, avec les valeurs numériques fournies : 5,1Cθ.10.3
MM
3
+=
−
&& . Sachant que
M
11
θ.
δ
.
2
R
θ.
2
R
z&&
&−=−= , on peut écrire :
z.
3
10.14
z.
R
δ.2
θ
3
1
M
&&
&−=−= et donc : M
C5,1z.14 =−− && .
Entre t = 0 et t = t1 : accélération constante
01,0az ==
&&
m.s-2 → CM = – 1,64 N.m
Entre t = t1 et t = t2 : stabilisation pendant 5 s à la vitesse de 0,6 m.min-1 = 0,01 m.s-1
→ CM = – 1,50 N.m
Entre t = t2 et t = t3 : accélération constante
01,0az ==
&&
m.s-2 → CM = – 1,64 N.m
Entre t = t3 et t = t4 : stabilisation pendant 5 s à la vitesse de 2,4 m.min-1 = 0,04 m.s-1
→ CM = – 1,50 N.m
Entre t = t4 et t = t5 : accélération constante
01,0az ==
&&
m.s-2 → CM = – 1,64 N.m
Après t = t5 : stabilisation à la vitesse de 6 m.min-1 = 0,1 m.s-1 → CM = – 1,50 N.m
Temps t en s
Couple du moteur C
M
en N.m
t
1
t
2
t
3
t
4
t
5
0
- 1,50
- 1,64
Question 5 : Le moteur choisi RS510L convient-il ?
On voit que le couple moteur ne dépasse jamais (en norme) un couple moteur de 1,64 N.m < 1,7 N.m :
on reste donc toujours sous la zone de résistance thermique pour le couple, ce qui valide le moteur pour
cette contrainte.
Pour ce qui est de la vitesse, le maximum est atteint à la fin de la montée où la vitesse de déplacement
vertical est de 6 m.min-1 = 0,1 m.s-1. Cette vitesse correspond à une vitesse de rotation du moteur de
dM / dt = – 466,7 rad.s-1 soit une vitesse de rotation du moteur dans le sens négatif de 4456,34
tours.min-1 < 4500 tours.min-1 : on reste donc, là aussi, dans la zone limite de fonctionnement du moteur,
ce qui valide le moteur pour cette contrainte.
Le moteur choisi convient donc, car ses points de fonctionnement se trouvent tous dans la zone de ré-
sistance thermique indiquée sur le graphique.
1
/
2
100%