Télécharger

TS
Devoir surveillé N°4
lundi 06/02/2017
Nom et Prénom :…………………………………………………………………………………………………………………………………..
Exercice 1 – Quantité de mouvement (5 points)
Document n°1 : L'astéroïde Bennu menace la Terre, mais la Nasa a pris les choses en main
Bennu est un astéroïde de 500 mètres de diamètre. Soit plus massif que l'Empire State Building, ou la tour
Eiffel. Depuis sa découverte en 1999, des chercheurs se sont rendu compte que cet astéroïde, qui porte aussi le
doux nom de 101955, pourrait croiser la route de la Terre en... 2182.
Même si la potentialité d'une rencontre avec la planète bleue n'est estimée par des scientifiques de la Nasa
qu'à 1 chance sur 2500, l'agence spatiale a décidé d'envoyer une sonde, pour chasser l'astéroïde. Osiris-Rex,
c'est son nom, est en cours d'élaboration depuis plusieurs mois.
La Nasa a annoncé il y a quelques jours qu'elle décollerait le 8 septembre pour rejoindre Bennu en 2018.
Extrait d’un article du site Express.fr publié le 02/08/2016
Document n°2 : Caractéristiques des astéroïdes Bennu et NL56
Extrait du site de la NASA recensant tous les géo croiseurs http://neo.jpl.nasa.gov
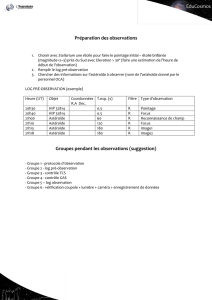
Document n°3 : Mouvement de l’astéroïde Bennu considéré rectiligne uniforme pendant quelques minutes
( = 1,00 minute)
A1 A2 A3 A4 A5 A6
1. À partir du document n°3, vérifier que la vitesse vA3 de l’astéroïde au point A3 (en négligeant
l'accélération causée par le champ de gravité terrestre) est cohérente avec vinfinity(Bennu) donnée par
la NASA. Représenter le vecteur vitesse
.
2. Exprimer puis calculer la quantité de mouvement de l’astéroïde Bennu au point A3.
Pour la question suivante, nous supposerons que l’astéroïde NL56 se déplace sur la même trajectoire que
l’astéroïde Bennu. Son mouvement est considéré rectiligne uniforme de vitesse vinfinity(NL56). On considérera
que l’interaction gravitationnelle entre les deux astéroïdes n’entraine pas de variation de vitesse
significative. À un instant t, loin de tout autre astre, l’astéroïde NL56 rattrape l’astéroïde Bennu et vient
s’y écraser sans explosion (aucune variation de masse).
3. En énonçant la (les) loi(s) utilisée(s) et en vous appuyant sur des schémas, déterminer la valeur de
la vitesse du système {astéroïde Bennu + astéroïde NL56} après l’impact.
Tout élément de la démarche sera valorisé, même si celle-ci n’aboutit pas.
200 km
1
0,5
0,75
2,75

Exercice 2 – Mouvement dans un champ de pesanteur (9,5 points)
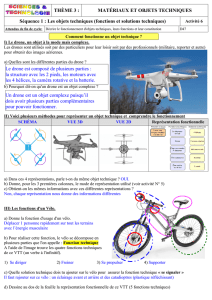
Les drones de loisirs à quatre hélices sont des véhicules aériens de faible
dimension. Ils sont vendus au grand public comme un jeu pour l’intérieur ou
l’extérieur.
De nombreux drones sont pilotés depuis un téléphone portable et sont équipés
d’une webcam.
Étude dynamique du vol d’un drone
Dans cette partie, on étudie le mouvement du drone dépourvu de webcam dans le référentiel terrestre supposé
galiléen. Le drone étudié, de masse 110 g, est assimilé à un point matériel noté G.
Donnée :
Le champ de pesanteur terrestre est considéré uniforme ; la valeur de son intensité g vaut 9,8 N.kg-1.
1. Estimation de la valeur de la force de poussée
Un film du décollage vertical a été réalisé afin de déterminer la force de poussée exercée sur le drone.
Le schéma ci-dessous représente la position du drone à l’instant initial. Le point O est l’origine du repère.
Le schéma ci-dessous est tracé sans souci d’échelle.
L’exploitation du film a permis d’obtenir l’évolution dans le temps des grandeurs z(t) et az(t), respectivement
coordonnées suivant l’axe vertical du vecteur position et du vecteur accélération du drone, et les deux courbes
ci-dessous modélisant l’évolution de ces grandeurs.
1.a. À partir de ces courbes, établir l’expression vz(t) de la coordonnée suivant l’axe vertical (Oz) du
vecteur vitesse du drone. Justifier
On suppose que seuls le poids
P
et la force de poussée
F
agissent sur le drone lors de la phase de
décollage vertical.
0,75

1.b. Comparer qualitativement les valeurs des forces
P
et
F
lors du décollage. Justifier votre réponse.
1.c. Calculer la valeur de la force de poussée lors du décollage.
1.d. On souhaite fixer une webcam de masse mw sur ce drone. Quelle serait, en théorie, la masse
maximale de cette webcam au-delà de laquelle le décollage ne serait plus possible ?
2.2. Conséquence d’une perte de communication sur le vol du drone
Le drone, dépourvu de webcam, est à présent animé d’un mouvement rectiligne uniforme à l’altitude
constante h = 7,0 m et à la vitesse v0 = 4,0 m.s-1.
On choisit dans cette partie une nouvelle origine des temps.
À l’instant t = 0 s, la communication entre le drone et le téléphone portable est rompue, alors que le
drone vole en direction d’une piscine. Les moteurs s’arrêtent. La valeur de la force de poussée devient
nulle. On considère que le drone est en chute libre alors qu’il est à la verticale d’un point situé à une
distance d = 20 m de la piscine de largeur L = 5 m.
2.a. Proposer une schématisation légendée de la situation.
2.b. En détaillant la démarche, établir les équations horaires du mouvement du drone.
2.c. En déduire l’équation de la trajectoire du drone lors de sa chute et qualifier le mouvement.
2.d. Déterminer le temps dont dispose l’opérateur pour rétablir la communication avant que le drone ne
touche le sol.
2.e. Le drone tombe-t-il dans la piscine si la communication n’est pas rétablie ?
1
0,5
0,75
0,5
4
1
0,5
0,5

Exercice 3 : Mouvement dans un champ électrostatique (5,5 points)
Les rayons X, découverts en 1895 par le physicien allemand Wilhelm Röntgen, sont des rayonnements
électromagnétiques utilisés principalement en imagerie médicale (radiologie) et en cristallographie (étude des
substances cristallines).
L’objectif de cet exercice est d’étudier la production des rayons X et leur utilisation dans l’analyse de la
structure des cristaux.
Accélération d’un faisceau d’électrons
Les rayons X sont produits dans des dispositifs
appelés tubes de Coolidge (W.D.COOLIDGE, physicien
américain, 1873 -1975).
Dans ce dispositif, des électrons émis par un filament
chauffé par effet Joule, sont accélérés sous l’effet
d’un champ électrique uniforme
E
. Ce champ est créé
par une tension électrique U d’environ 100 kV.
Les électrons se dirigent vers une cible de molybdène, métal de symbole Mo, avec laquelle ils interagissent pour
produire les rayons X. Se déplaçant à une vitesse très élevée, ces électrons peuvent acquérir une énergie
cinétique suffisante pour perturber les couches électroniques internes des atomes de la cible. Ces atomes, dans
un état excité, vont alors émettre des rayons X en retournant à leur état fondamental.
La figure 1 ci-dessous reprend de manière simplifiée le principe du tube de Coolidge.
Données :
entre le filament et la cible, séparées d’une distance OA = L = 2 cm, règne un champ électrique uniforme
E
dont la valeur est donnée par la relation :
U
EL
;
célérité de la lumière dans le vide : c = 3,00 × 108 m.s-1 ;
charge électrique élémentaire : e = 1,60 × 10–19 C ;
masse de l’électron : me = 9,11 × 10–31 kg ;
intensité de la pesanteur : g = 9,8 N.kg-1 ;
On se propose d’évaluer l’ordre de grandeur de la vitesse atteinte par les électrons lorsqu’ils arrivent sur la
cible en molybdène.
On suppose pour cela qu’un électron est émis au point O avec une vitesse nulle à t = 0 s. Il arrive au point A avec
une vitesse
v
.
On considère qu’il est soumis à la force électrique
e
F
.
1. Un champ électrique est créé entre deux plaques portant des charges opposées. L’une de ces plaques
est la cible en molybdène. Quelle est la charge portée par cette plaque. Justifier.
2. Donner l’expression vectorielle de la force électrique
e
F
subie par un électron.
Comparer la direction et le sens de la force électrique
e
F
à ceux du champ électrique
E
.
3. Montrer que dans le cas où la tension électrique U appliquée entre le filament et la cible vaut 100 kV,
on peut négliger le poids de l’électron devant la force électrique.
4. Montrer que l’expression de la vitesse de l’électron lorsqu’il arrive au point A est :
.2
Ae
eU
vm
Tout élément de la démarche sera valorisé, même si celle-ci n’aboutit pas.
5. Calculer la vitesse de l’électron lorsqu’il arrive au point A dans le cas où la tension électrique U
appliquée entre le filament et la cible vaut 100 kV.
0,5
0,25
0,25
0,75
3,5
0,25

CORRECTION
Exercice 1 : Quantité de mouvement
1.
La vitesse au point A3 est proche de celle annoncée par la NASA (5,99 km/s)
A1 A2 A3 A4 A5 A6
2. pA3 = mBennu * VA3 = 6,0.1010 * 5,99.103 = 3,6.1014 kg.m/s
La quantité de mouvement de l’astéroïde Bennu vaut 3,6.1014 kg.m/s
3.
Avant le choc
pBennu = mBennu * vinfinity(Bennu) = 3,6.1014 kg.m/s
pNL56 = mNL56 * vinfinity(NL56) = 1,6.1010 * 13,07.103 = 2,1.1014 kg.m/s
--------------------------------------------------------------------------------------------------------------- trajectoire
Après le choc
----------------------------------------------------------------------------------------------------------------------------
On considère que le système {astéroïde Bennu + astéroïde NL56} est isolé (car loin de tout autre astre).
D’après la 1ère loi de Newton (ou principe de conservation de la quantité de mouvement), la quantité de
mouvement d’un système isolé reste constante.
On projette les vecteurs sur un axe colinéaire à la trajectoire des 2 astéroïdes.
pBennu + pNL56 = paprès
mBennu * vinfinity(Bennu) + mNL56 * vinfinity(NL56) = (mBennu + mNL56)* v
La vitesse du système {astéroïde Bennu + astéroïde NL56} après l’impact vaut 7,5 km/s
200 km
2,0 km/s
 6
7
8
9
6
7
8
9
1
/
9
100%