Chapitre 1 : Energie et puissance. A. Relation entre énergie et

Chapitre 1 : Energie et puissance.
A. Relation entre énergie et puissance.
La puissance (en Watt) correspond à un débit d’énergie c’est la quantité d’énergie que fournit un
système à un autre par unité de temps.
L’unité officielle (S.I), pour l’énergie est le joule ; l’unité officielle du temps est la seconde.
(1 joules = travail effectué par une force de 1N dont le point d’application se déplace de 1m)
Usuellement, l’unité utilisée pour l’énergie est Wh ou kWh ; le temps est alors exprimé en h
pour retrouver la puissance en W.
Des systèmes de puissances différentes pourront fournir la même énergie, mais le système le plus
puissance sera le plus rapide.
B. Les unités de l'énergie.
L’unité officielle, pour l’énergie est le joule. Cette unité est très faible pour mesurer les productions
et consommations d’énergie à l’échelle mondiale.
Le pétrole étant la source d’énergie la plus utilisée dans le monde, on l’utilise comme référence en
unité d’énergie la « tonne d’équivalence pétrole (tep) ».
Chaque type de d’énergie possède son unité privilégiée, et c’est pour les comparer que l’on utilise les
unités de base que sont le joule et le Mtep (ou le kWh lorsqu’il s’agit d’énergie électrique).
C. La transformation de l'énergie (principe de conservation de l'énergie).
« Rien ne se perd, rien ne se crée, tout se transforme », « l’énergie se conserve ».
L’énergie existe sous différente formes : électrique, mécanique (cinétique, gravitationnelle),
calorifique, chimique, nucléaire.
L’énergie, ne peux pas être créé et ne peut pas être détruite on peut seulement l’utiliser en la
transférant ou en la transformant.
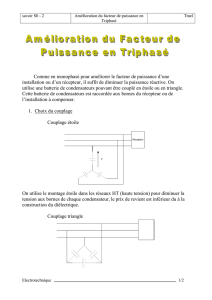
D. Bilan énergétique et rendement.
Réaliser un bilan énergétique consiste à évaluer les énergies absolue, utilise et perdue d’un
système.

Représentation :
Le calcul du rendement s’effectue à partir de la relation :
Pour calculer un rendement, il faut réaliser un « bilan énergétique » ce qui consiste à faire
l’inventaire énergétique de la transformation d’un système (Energie absorbée ? Energie
récupérée ? Energie perdue ?).
Représentation d’une chaîne énergétique : l’énergie se transmet d’un système à un autre (ou
plusieurs autres), à l’aide d’un lien matériel (accouplement mécanique, conducteur électriques, air…)
ou non (radiation). L’ensemble des systèmes peut alors se représenter sous la forme d’une chaîne
(éventuellement ramifiée) qui décrit mes transferts et les dégradations d’énergie.
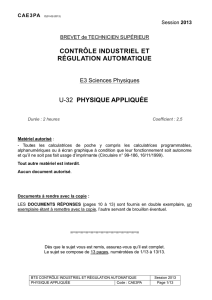
Exemple 1 : Perceuse portative.
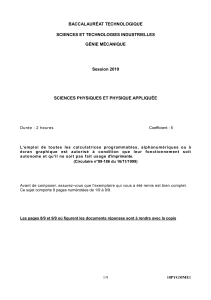
Exemple 2 : Lecteur DVD.
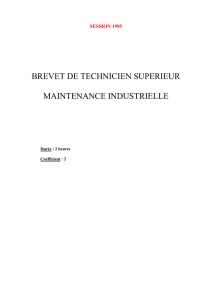
Exemple 3 : Central nucléaire.
Energie absorbé Energie inutile
(énergie fournie)
Energie perdu
Elec Meca
Chimique
E. absorbé
Thermique Thermique
Elec
Elec
Batterie Moteur
Lecteur DVD
Moteurs
Laser
Moteurs
Laser
Elec
E. absorbé
Meca
Lecteur DVD
Lecteur DVD
Lumière
Thermique


1) Etude du circuit primaire.
a)
Circuit
primaire
Chaleur
Méca
Méca
Pressuriseur
Pompes
𝑃𝑎𝑀𝑊

b)
c)
d)
2) Etude du circuit secondaire.
a)
b)
c)
d)
3) Etude de l’alternateur.
a)
b)
c)
d)
Circuit
primaire
Circuit
primaire
𝑃𝑎𝑀𝑊
E. Thermique
𝑃
𝑀𝑊
Circuit
secondaire
Circuit
secondaire
𝑃
𝑀𝑊
Pompes
𝑃𝑎
𝑃𝑎𝑀𝑊
𝑃𝑎𝑀𝑊
E. Thermique
𝑃
𝑀𝑊
Turbine
𝑀
𝑊
E. Thermique
𝑃
𝑃
𝑃
Circuit
secondaire
𝐴
Alternateur
𝑃𝑎 𝑀𝑊
Méca
𝑃
𝑒𝑙𝑒𝑐 𝑀𝑊
Elec
𝑀𝑊
Réseau
900 MW
Centrale 34 MW
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
1
/
171
100%