Télémétrie Laser

Télémétrie Laser
!Télémétrie Laser 2 voies
!Transfert de temps par Lien Laser T2L2
!Télémétrie Laser Interplanétaire
R&D METROLOGIE
Etienne Samain,
OCA, Gémini, 2130 route de l’observatoire,
06460 Caussols,
France

Télémétrie Laser
2 voies
R&D METROLOGIE

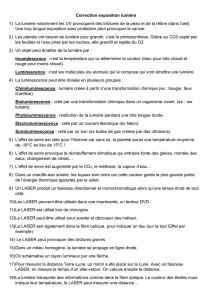
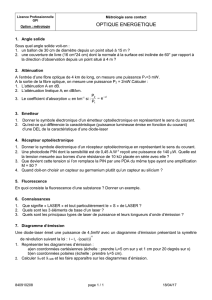
Principe de la télémétrie laser
station laser rétroréflecteur
Positionnement
!Propagation d’une
impulsion
!Modulation gaussienne de
la porteuse optique
!Vitesse de groupe
!Définition du temps :
Atome
!Définition de longueur :
distance parcourue par une
onde électromagnétique
pendant un temps donnée

Objectifs scientifiques
!Mesure des grandes longueurs d’onde du champ de
gravité terrestre
»Détermination précise et exacte des orbites
»Etude des variations dans le temps du champ de gravité
– Circulation atmosphérique
– Echange de masse Glaciers – Atmosphère – Océan
– Etude du rebond post-glacier
!Détermination de la position et du mouvement des
stations laser par rapport au géo-centre
»Référence pour l’étude du niveau des océans
»Référence pour l’étude du rebond post-glacier

Objectifs scientifiques
!Variation de la rotation de la terre
»Détermination de solution rapide du temps UT0
»Etude de l’échange de moment angulaire
Atmosphère – Océan – Glacier – Terre solide
»Etude de la dissipation d’énergie liée aux marées
!Etude de la tectonique des plaques
»Exactitude : mm/an
!Étalonnage altimètre pour la mesure du
niveau des mers
»Séparation de la dérive des instruments / dérive long
terme du niveau des mers
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
1
/
103
100%