CIT Voiture radiocommandée

Les principes de la radiocommande pour modèle réduit.
1) Présentation d’un ensemble de Radiocommande
Un ensemble de Radiocommande est composé avant tout d’un boitier d’émission (émetteur) et
d’un récepteur. L’émetteur envoie ses ordres (position des manches) au récepteur par ondes
radios « haute fréquence ». Celui-ci les transmet alors à des actionneurs : servomoteur,
variateur de vitesse pour moteur électrique.
2) Principe de fonctionnement de la radiocommande
Lorsque l’antenne de la radiocommande est parcourue par un courant alternatif, elle émet des
ondes électromagnétiques. Ces ondes se propagent dans l’espace et sont recueillies par
l’antenne réceptrice. Elles produisent dans l’antenne réceptrice un courant de même fréquence
et de même forme que celui qui parcourt l’antenne émettrice.
Pour transmettre les informations vitesse et direction, le signal émis par la radiocommande est
modulé en amplitude (AM) ou en fréquence (FM).
Un signal modulé en amplitude se compose de deux parties :
- un signal sinusoïdal de fréquence élevée (HF) appelé porteuse, généré par un oscillateur à
quartz qui fixe précisément la fréquence d’émission.
- un signal qui contient les deux informations à transmettre (vitesse et direction) et qui fait varier
l’amplitude de la porteuse avec 2 valeurs possibles (absence ou présence du signal).
La fréquence porteuse peut être modifiée en fonction du choix du quartz. Cela permet d’avoir
différentes fréquences pour plusieurs pilotes sur un même site autour de 26 MHz, 41 MHz ou
72 MHz. Les seules gammes de fréquences qui soient autorisées en voiture RC :
Radiocommandé (voir la réglementation des fréquences pour le modélisme).
Enfin le récepteur doit être accordé avec l’émetteur en utilisant un quartz de même fréquence
que la porteuse.
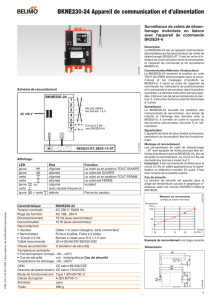
Moteur électrique
Servomoteur
Récepteur
Variateur de vitesse
Boitier d’émission

3) Description de l’ensemble de radiocommande
a) Le boitier d’émission :
Le boitier d’émission se présente sous la forme d’un pupitre équipé de manches qui actionnent
des potentiomètres (résistances à curseur).
Ce sont généralement des émetteurs deux voies proportionnelles, l’une pour la commande de
direction (CH1), l’autre pour la commande de la vitesse (CH2). Deux systèmes de réglage,
baptisés TRIM, permettent d'ajuster la position neutre des deux voies. On trouve aussi souvent
des commutateurs pour inverser leur sens, c'est en général les seuls réglages sur les radios
d'entrée de gamme.
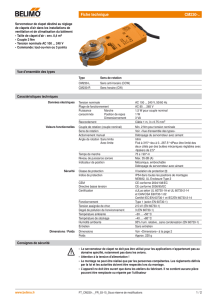
b) Le boitier de réception :
Les ondes émises par la radiocommande sont captées par l’antenne de réception. De ce
récepteur partent deux informations destinées au servomoteur de direction et au variateur de
vitesse.
Une voie proportionnelle (contrairement aux voies « Tout-ou-Rien ») permet de commander des éléments qui
demandent à être contrôlés de manière progressive comme l’ensemble de direction ou la vitesse de rotation d’un
moteur.
Les voies « Tout-ou-Rien », au contraire, se limitent à mettre en marche ou à arrêter un équipement. Exemple,
l’allumage ou l’extinction de feux lumineux. On n’a pas besoin de progressivité pour cela.
Pour une voiture RC, le minimum est donc 2 voies proportionnelles : une pour la commande progressive de la
direction et une seconde pour la commande progressive du moteur.
Connexions au servomoteur de
direction et variateur de vitesse.
Connexion à la batterie ou
piles (alimentation 4,8 – 8,4V)
Quartz
Antenne de réception
Boitier de réception

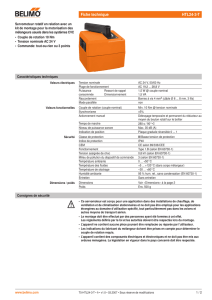
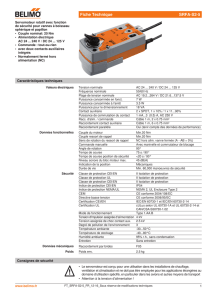
c) Le servomoteur :
Un servomoteur est constitué d'un moteur électrique, d'un réducteur (ensemble de roues
dentées), et d'un système d'asservissement permettant de vérifier que l’on a bien fait le
déplacement voulu (potentiomètre + circuit électronique)
Ils transforment les ordres reçus par le récepteur, en mouvements mécaniques. On utilise
la plupart du temps un servomoteur pour commander la direction d’une voiture RC.
Sur le dessus, un axe permet d’actionner un petit levier (palonnier). Cet axe peut tourner
d’environ 90° de part et d’autre de sa position de repos. Celui-ci permettra de transmettre un
mouvement aux roues avant de la voiture RC.
Palonnier
Réducteur
(Roues dentées)
Moteur électrique

La commande d’un servomoteur :
Un servomoteur traduit la durée d’une impulsion électrique issue du boitier récepteur, en un
mouvement de rotation. Le signal de commande de l’angle de rotation est une impulsion
positive pendant un temps variable et court de 1 à 2 ms (milliseconde).
Cette impulsion doit se répéter toutes les 20 ms environ (50 fois par seconde). C’est la durée
de 1 à 2 ms qui détermine la position angulaire du servomoteur. Une standardisation des
valeurs s'est imposée :
• 1ms --> limite basse (le servomoteur est à gauche par exemple.)
• 1.5ms --> neutre (le servomoteur est en position médiane)
• 2ms --> limite haute (le servomoteur est à droite par exemple.)
L'impulsion de commande est fabriquée par le codeur du boîtier émission qui par
l’intermédiaire de la fonction émission HF la transmet au récepteur HF. Elle est, après
décodage, délivrée au servomoteur.
Pour plus d’information sur le servomoteur (cliquez-ici)
d) Le moteur électrique et le variateur de vitesse :
Les voitures à motorisation électrique sont équipées d’un moteur associé au variateur de
vitesse. Le variateur, à partir des signaux de commande transmis par le récepteur, commande
le moteur électrique dans les deux sens de rotation (marche avant et arrière) avec une vitesse
variable.
Moteur électrique
Servomoteur
Récepteur
Variateur de vitesse

Le variateur commande la vitesse du moteur par variation de la tension moyenne à ses bornes.
La technique utilisée est la modulation de largeur d’impulsion (MLI).
Formule de la tension moyenne aux bornes du moteur par rapport à la durée de l’impulsion et la
période du signal :
Où :
Umoy est la tension moyenne aux bornes du moteur,
Umax est la tension maximale d’alimentation du moteur.
Durée de l’impulsion
Période du signal
Durée de l’impulsion
Période du signal
moy max Durée de l'impulsion
Période du signal
u =u x
1
/
5
100%