Énoncer

Spé ψ 2014-2015 page 1/4 Devoir n°6
Spé ψ 2014-2015 Devoir n°6
ÉLECTROMAGNÉTISME
Ce problème est consacré aux capteurs électromagnétique ;
Les capteurs de proximité sont caractérisés par l’absence de liaison mécanique entre le dis-
positif de mesure et l’objet constituant la cible. L’interaction entre eux est réalisée par
l’intermédiaire d’un champ électrique, d’un champ magnétique ou d’un champ électromagnétique.
Ces capteurs sont utilisés :
•
soit en mode analogique : l’amplitude du signal détecté est fonction de la distance
relative entre capteur et cible (et surtout de ses variations) ;
•
soit en mode binaire : le signal ne peut avoir que deux niveaux (haut ou bas) selon
l’absence ou la présence de l’objet à une distance fixée ou non du capteur.
PREMIERE PARTIE
CAPTEUR DE PROXIMITE CAPACITIF
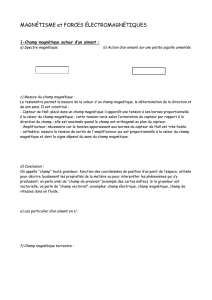
Comme le montre la figure 1a ci-dessous, la tête de mesure de ce capteur est formée
d’un conducteur cylindrique (A) et d’une enveloppe métallique coaxiale (B) réalisant un condensa-
teur de capacité fixe Ce :
Le but de la mesure est de détecter la distance z entre la tête de mesure et la cible.
Lorsque la cible métallique s’approche de l’extrémité des conducteurs (A) et (B), ceux-ci
constituent avec elle deux autres condensateurs :
• l’un, de capacité C(z), a pour armatures le disque externe du conducteur central
cylindrique (A) de diamètre 2r et z est la distance qui le sépare de la cible ;
• l’autre est un condensateur parasite, de capacité Cp(z), formé par l’enveloppe ex-
térieure (B) du capteur et l’armature interne A.
Le schéma électrique équivalent du capteur est représenté sur la figure 1b.
I-1) Énoncer le théorème de GAUSS en électrostatique dans le vide de permittivité ε0.
Considérons un condensateur plan dont les faces en regard sont distantes de d et de surfaces
S ; le vide règne entre ces deux électrodes. La distance d est suffisamment faible pour supposer les
surfaces infinies.
I-2) Exprimer, en le justifiant, le champ électrique E
J
G
et le potentiel V dans le condensateur
en fonction de la charge Q qu’il emmagasine, de S et de ε0 ; en déduire sa capacité C.
Étudions maintenant un condensateur cylindrique de longueur infinie. Le rayon de
son armature interne est r1 et le rayon de son armature externe est r2 ; 0
ε
est la permittivité du vide
entre ces deux électrodes et Q la charge d’une armature de longueur A.
Fi
g
ure Fi
g
ure
Ce
z
2r
e
ARMATURE INTERNE
B
A
ARMATURE EXTERNE
CIBLE METALLI
Q
UE
A
B
Ce
C(z)
Cp(z
Cp(z)
C(z)
A

Spé ψ 2014-2015 page 2/4 Devoir n°6
I-3) Exprimer, en le justifiant, le champ électrique E
J
G
dans le condensateur. En déduire
l’énergie stockée WE et la capacité C de ce condensateur pour une longueur commune A des élec-
trodes. Écrire le résultat sous la forme :
()
21
/ln
Crr
α
= et identifier α.
I-4) Écrire l’expression de la capacité C(z) en fonction de ε0, r et z⋅, puis celle de la capacité
Ce en fonction de ε0, A, r et e.
I-5) Déterminer la capacité CAB de la tête de mesure en fonction de Ce, C(z) et Cp(z).
I-6) Proposer une opération technique simple permettant de s’affranchir de la capacité para-
site Cp(z) (ce qui sera le cas dans la suite du problème : p
C→∞).
I-7) Écrire l’expression finale de la capacité CAB en fonction de ε0, A, r , e et z, sachant que
la distance e entre les armatures en regard est faible devant leurs rayons respectifs. (effectuer pour
cela un développement limité au 1er ordre en e/r).
Le capteur fonctionne pour une distance cible-tête de mesure z variant d’une faible
quantité
Δ
z à partir d’une valeur de référence z0 : z = z0 +
Δ
z (avec l’approximation
Δ
z/z0 << 1).
I-8) Montrer que la capacité CAB peut s’écrire sous la forme : AB 0 0
1z
CC k
z
⎛⎞
Δ
=+
⎜⎟
⎝⎠
; identi-
fier C0 et k, puis calculer de façon approchée leurs valeurs numériques à l’aide des données suivan-
tes : r = 10 mm ; A = 10 mm, e = 1 mm, z0 = 2 mm et ε0 = 9⋅10–12 F⋅m–1.
I-9) Citer les avantages et les inconvénients inhérents à l’utilisation de ce capteur capacitif.
DEUXIEME PARTIE
CAPTEUR DE PROXIMITE A RELUCTANCE VARIABLE
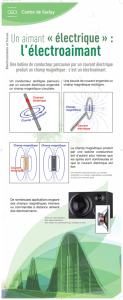
Un capteur inductif permet de mesurer la distance qui le sépare d’un ruban magnétique dé-
filant. Il est assimilable à un circuit magnétique (Figure 2) constitué d’un matériau doux feuilleté
en forme de U dont la section est un carré d’aire S1 = a2. Autour du circuit sont bobinés N enroule-
ments (b) d’un conducteur parcouru par un courant d’intensité I.
La ligne moyenne
du circuit magnétique est
représentée en pointillés
sur le schéma, elle est de
longueur A1 dans le
feuilletage ; la perméa-
bilité magnétique du
matériau doux vaut
μ
1 = 500
μ
0,
μ
0
étant la
perméabilité magnétique
du vide.
Ce capteur est
placé en regard d’un ruban métallique ferromagnétique de largeur supérieure à a. Il est en défile-
ment continu à une distance x devant le capteur ; son épaisseur est notée e et la perméabilité ma-
gnétique du matériau constitutif vaut
μ
2 = 700
μ
0.
Les lignes de champ sont parfaitement guidées par le circuit magnétique. L’entrefer entre le
circuit magnétique et le ruban est suffisamment petit pour pouvoir négliger les fuites de flux ma-
gnétique. Les courants induits qui peuvent circuler dans le ruban sont négligés.
La longueur du contour d’AMPERE moyen
Γ
adopté se décompose ainsi : 1
A dans le capteur,
2x dans l’air et 2
A dans le ruban. Les valeurs de l’excitation magnétique (respectivement du champ
Figure 2
e
(
b
a
x
(
μ
1)
Circuit magnétique
N
I
Ruban (μ2)
en défilement
1
A (tout le contour
en pointillés)
2
A

Spé ψ 2014-2015 page 3/4 Devoir n°6
magnétique) seront notées H1 (respectivement B1) dans le capteur, H0 (respectivement B0) dans
l’air et H2 (respectivement B2) dans le ruban.
II-1) Énoncer le théorème d’AMPERE relatif au vecteur excitation magnétique.
II-2) Appliquer ce théorème le long du contour moyen Γ.
II-3) Écrire, en justifiant votre raisonnement, le flux Φ du champ magnétique successive-
ment à travers les sections du capteur, du ruban et de l’air. Le champ magnétique est noté respecti-
vement 1
B
JG , 2
B
JG et 0
B
JG pour chacune de ces régions ; a et e sont les longueurs permettant de préciser
les surfaces des sections qu’ils traversent.
II-4) Exprimer les relations liant les excitations magnétiques aux champs magnétiques dans
les trois parties du dispositif. Établir l’expression de B1 en fonction de I, N, 1
A, 2
A, a, e, x, μ0, μ1 et
μ2.II-5) Définir un matériau ferromagnétique ; préciser le phénomène qui le caractérise et citer
des exemples. Quelles sont les spécificités d’un matériau ferromagnétique doux feuilleté ?
II-6) Déterminer le flux magnétique Φb dans la bobine (b). Exprimer l’inductance L(x) de la
bobine pour une distance x entre le capteur et le ruban, en fonction de N, 1
A, 2
A, a, e, x, μ0, μ1 et μ2.
La valeur de consigne pour la distance capteur-ruban est fixée égale à x0 ; toute
distance quelconque pourra s’écrire x = x0 +
Δ
x .
II-7) Montrer que l’inductance L(x) de la bobine peut s’écrire, en fonction de l’inductance
associée à la distance de consigne L(x0) notée L0 et de l’écart Δx, sous la forme :
()
0
1L
Lx Ax
=+Δ
.
Identifier L0, puis écrire A sous la forme :
1
0
12
10 2
2xa
Ae
−
⎛⎞
=ψ + +
⎜⎟
μμ μ
⎝⎠
AA
. Déterminer ψ.
Les données relatives au capteur : N = 100, 1
A = 12 cm, 2
A = 5 cm, a = 3 cm, x0 = 10 mm,
e = 0,1 mm et
μ
0 = 4
π×
10–7 H
⋅
m–1, permettent de calculer les grandeurs L0 = 0,3 mH et A = 50 m–1.
La grandeur définie comme le rapport ℜ de la somme des courants enlacés NI sur le
flux du champ magnétique au travers de la section S d’un tube de champ, porte le nom de réluc-
tance : ℜ = NI/
Φ
.
II-8) Exprimer cette grandeur ℜ en fonction de 1
A, 2
A, a, e, x, μ0, μ1 et μ2 puis en fonction
de N et de L(x). Analyser son sens physique par analogie électrique.
Justifier le titre de cette partie : capteur de proximité à réluctance variable.
II-9) Citer les avantages et les inconvénients inhérents à l’utilisation de ce capteur inductif.
TROISIÈME PARTIE
CAPTEUR INDUCTIF
Extrait du programme officiel concernant les « résolution de problème ».
Compétence Exemples de capacités associées
S’approprier le problème. Faire un schéma modèle.
Identifier les grandeurs physiques pertinentes, leur attribuer un symbole.
Évaluer quantitativement les grandeurs physiques inconnues et non précisées.
Relier le problème à une situation modèle connue.….
Etablir une stratégie de réso-
lution (analyser). Décomposer le problème en des problèmes plus simples.
Commencer par une version simplifiée.
Expliciter la modélisation choisie (définition du système, …).
Déterminer et énoncer les lois physiques qui seront utilisées.…..
Mettre en œuvre la stratégie
(réaliser). Mener la démarche jusqu’au bout afin de répondre explicitement à la question posée.
Savoir mener efficacement les calculs analytiques et la traduction numérique.
Utiliser l’analyse dimensionnelle.…

Spé ψ 2014-2015 page 4/4 Devoir n°6
Avoir un regard critique sur
les résultats obtenus (valider). S’assurer que l’on a répondu à la question posée.
Vérifier la pertinence du résultat trouvé, notamment en comparant avec des estimations ou
ordres de grandeurs connus.
Comparer le résultat obtenu avec le résultat d’une autre approche (mesure expérimentale
donnée ou déduite d’un document joint, simulation numérique, …).
Étudier des cas limites plus simples dont la solution est plus facilement vérifiable ou bien
déjà connue.…
Communiquer. Présenter la solution ou la rédiger, en en expliquant le raisonnement et les résultats.…
(Cette question aura un barème de 2,5 points )
Données magnétostatique : étant donné un solénoïde cylindrique de longueur finie L = 1 cm,
de centre O et d’axe Oz, on repère un point M dans la base
cylindrique d’axe Oz. On peut montrer que le champ ma-
gnétique crée par ce solénoïde en un point M voisin de
l’axe Oz s’écrit
() ( )()
(
)
,,
rz
rz
B
MBrzeMBrze=+
JG G G où
() ()
(
)
2
2
2
,4
zdBz
r
Brz Bz dz
=− en notant B(z) le champ en
un point de l’axe qui a la même cote que M.
On note f(z) = B(z)/B0 où B0 est le champ au point
O. La figure 3 donne la courbe
() () ()
1"
2
gz fz f z=− .
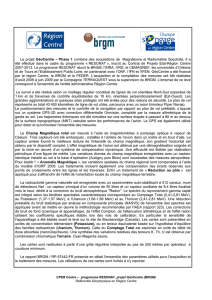
On étudie un capteur constitué de deux pièces. La première est une bobine de spires, soli-
daire d’un support fixe par rapport au sol et connectée à un module électronique d’impédance
d’entrée infinie. La seconde est un petit aimant droit cylindrique de longueur 10 mm fixé sur un
solide susceptible de se déplacer.
Les axes de l’aimant et du solénoïde sont
confondus. Lorsque le solide vibre, l’aimant est animée
d’un mouvement de translation parallèle à son axe.
La bobine est un ensemble de N spires circulai-
res de rayon R = 2 mm à peine supérieur au rayon de
l’aimant. (figure 4).
En vous aidant de schémas et d’un nombre li-
mité de calculs, expliquez le fonctionnement de ce
capteur, en indiquant en particulier ce qu’il mesure et à
quelle distance de O doit se trouver l’aimant pour un
fonctionnement optimal.
PARTIE FIXE
PARTIE MOBILE
BOBINE
AIMANT CAPTEUR
Figure 4
Figure 3
1
/
4
100%