Estimateurs MCD de localisation et de dispersion: définition et calcul

1
Estimateurs MCD de localisation et de
dispersion:
définition et calcul
Fauconnier Cécile
Université de Liège

2
Plan de l’exposé
zIntroduction:
Pourquoi les estimateurs robustes?
zEstimateur MCD : définition
zAlgorithmes approximatifs les plus connus
zRelaxation du problème
zAlgorithme pour la nouvelle version du
problème
zConclusions

3
Introduction
Les estimateurs classiques de localisation et de
dispersion sont la moyenne empirique et la
variance empirique:
Soit , on a
{
}
n
xxX ,,
1K=
t
i
n
i
i
n
i
ixxxx
n
Sx
n
x)()(
11
11
−−== ∑∑ ==

4
Problèmes posés par les estimateurs
classiques:
Les estimateurs classiques sont fortement vulnérables
dès que l’ensemble des données considéré contient
des données atypiques.
Exemples:
zLocalisation d’un ensemble de données
zDétection des points aberrants

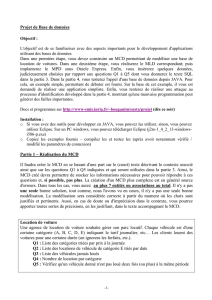
5
Localisation
-4-3-2-101234
data\1
-3
-2
-1
0
1
2
3
data\2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%