B - Page d`accueil

Induction 1
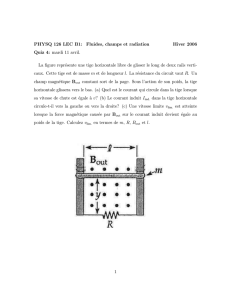
C’est le cas de Lorentz : conducteurs mobiles dans un champ magnétique constant.
La tige T
0
est animée d’un mouvement rectiligne uniforme. Le mouvement de cette tige va
modifier la surface du circuit. En présence d’un champ magnétique B uniforme et constant,
cette variation de surface va provoquer une variation de flux magnétique qui par la loi de
Faraday va induire l’apparition d’une f.e.m d’induction dans le circuit.
Comme le circuit est fermé, il apparaît aussi un courant électrique induit d’intensité i.
En présence de champ magnétique, ce courant va provoquer deux forces de Laplace, F
L0
et
F
L1
, s‘exerçant respectivement sur les tiges T
0
et T
1
. F
L0
va être neutralisée par une force F
op
exercée par l’opérateur sur la tige T
0
pour lui assurer une vitesse v
0
constante.
F
L1
va mettre en mouvement la tige T
1
. Par la loi de Lenz, l’action de F
L1
va s’opposer à la
cause qui lui a donné naissance, i.e. la variation de flux de B. Cette variation de flux
disparaît globalement si les deux barres forment un circuit mobile de surface constante.
Ainsi, la force F
L1
va provoquer la mise en mouvement de la tige T
1
dans le même sens que
celui de la barre T
0
et le phénomène d’induction disparaîtra globalement lorsque les deux
tiges auront la même vitesse.
Orientons l’espace et le circuit :
Pour l’espace, on choisit la base cartésienne directe (u
x
, u
y
, u
z
) avec u
x
défini par le
schéma et u
z
défini dans le sens de B, B = B.u
z
avec B > 0.
Pour le circuit, on choisit le sens trigonométrique qui oriente e, S et à l’occasion i.
Dessinons les schémas électrique et mécanique :
D’après notre orientation électrique, i et e doivent être négatives.
D’après notre orientation mécanique, F
L1
= F
L1
.u
x
, F
L0
= F
L0
.u
x
, F
op
= F
op
.u
x
, F
L1
et F
op
doivent
être positives tandis que F
L0
doit être négative.
Remarque :
Par définition de la force de Laplace subie par une tige, comme on est en A.R.Q.S., i est
uniforme dans le circuit, et par symétrie des tiges, on obtient immédiatement :
F
L1
= – F
L0
= F
op
.
i
R
R
e
T
0
⊙
B
x
v
0
T
1
F
L1
Fop
F
L0
i
⊙
S

Équation mécanique
Système : Tige T
1
; Référentiel : Terrestre supposé galiléen ;
Actions mécaniques : Le poids P
1
= m.g ; la réaction des rails R
1
;
La force de Laplace F
L1
=
1
T , sens de i
i.d
1
r
∫
∧ B
Relation fondamentale de la dynamique : m.a
1
= P
1
+ R
1
+ F
L1
.
Base et projections : On choisit la base cartésienne (u
x
, u
y
, u
z
) précédemment définie.
Suivant la verticale, le poids et la réaction se compensent : P
1
+ R
1
= 0.
Par définition de la force de Laplace, F
L1
=
1
T , sens de i
i.d
1
r
∫
∧ B.
Comme nous sommes en A.R.Q.S. et B est uniforme, nous pouvons sortir i et B de l’intégrale.
On obtient alors : F
L1
= i.CD ∧ B avec CD = – ℓ.u
y
.
Finalement, F
L1
= – i.B.ℓ.u
x
. F
L1
et i sont bien de signes opposés.
Finalement, on obtient suivant l’axe horizontal : m
1
dv
dt
= – i.B.ℓ.
Équation électromécanique
En tenant compte de l’orientation choisie, le flux de B vaut : Φ = ℓ(x
0
– x
1
)B > 0.
La loi de Faraday donne alors immédiatement : e = – ℓ.B(v
0
– v
1
) < 0.
On retrouve bien l’analyse qualitative :
Comme la tige T
1
poursuit la tige T
0
, la vitesse v
1
est inférieure à la vitesse v
0
donc la f.e.m. e
est négative. Lorsque les deux vitesses sont égales, e s’annule et le phénomène d’induction
disparaît
globalement.
Équation électrique
En écrivant la loi des mailles sur notre circuit : e = 2R.i.
Comme prévu, i est négatives.
En rassemblant les équations :
m
1
dv
dt
= – i.B.ℓ. e = – ℓ.B(v
0
– v
1
) = 2R.i.
Puis, en éliminant la f.e.m. e et l’intensité i du courant induit, on obtient :
m
1
dv
dt
=
2 2
.B
2R
ℓ
(v
0
– v
1
)
1
dv
dt
+
1
v
τ
=
0
v
τ
avec τ =
2 2
2m.R
.B
ℓ
La résolution de cette équation avec la condition initiale v
1
(0) = 0 donne :
v
1
(t) = v
0
[1 – exp(–
t
τ
)].

Après un régime transitoire, les deux barres T
1
et T
2
ont quasiment la même vitesse, la
surface du circuit reste alors constante et la variation du flux de B disparaît : le phénomène
d’induction ne concerne que le régime transitoire, il est absent du régime permanent.
Bilan en puissance
Pour faire un bilan en puissance mécanique, il faut reprendre toutes les équations
mécaniques et les multiplier respectivement par v
1
et v
0
:
[m
d
dt
1
v
= F
L1
].v
1
donne :
d
dt
(
2
1m
2
1
v
) = F
L1
.v
1
[m
d
dt
0
v
= F
op
+ F
L0
].v
0
donne :
d
dt
(
2
1
m
2
0
v
) = F
op
.v
0
+ F
L0
.v
0
Faisons la somme de ces deux équations :
(
)
c1 c0
d E E
dt
+
= F
L1
.v
1
+ F
op
.v
0
+ F
L0
.v
0
• P
op
= F
op
.v
0
est la puissance mécanique algébrique fournie par l’opérateur à la tige T
0
;
• P
ind/méca
= F
L1
.v
1
+ F
L0
.v
0
est la puissance mécanique algébrique reçue par les deux tiges
de la part de l’induction par l’intermédiaire des forces de
Laplace ;
•
(
)
c1 c0
d E E
dt
+
est la puissance cinétique des deux tiges ;
Pour faire un bilan en puissance électrique, il faut multiplier la loi des mailles par i :
[e = 2R.i].i donne : e.i = 2R.i
2
• P
ind/élect
= e.i.dt est la puissance électrique algébrique fournie par l’induction aux deux
tiges ;
• P
R
= 2R.i
2
est la puissance électrique reçue par les résistances des deux tiges, cette
puissance sera ultérieurement dissipée par effet Joule.
Comme e = – ℓ.B(v
0
– v
1
) F
L1
= – i.B.ℓ F
L0
= i.B.ℓ
On obtient immédiatement :
P
ind/élect
+ P
ind/méca
= e.i + F
L1
.v
1
+ F
L0
.v
0
= – ℓ.B(v
0
– v
1
)i + i.B.ℓ(v
0
– v
1
) = 0.
Le transfert de puissance électromécanique est égal à 1.
Finalement, on obtient :
(
)
c1 c0
d E E
dt
+
= P
op
+ P
ind/méca
P
ind/élect
= P
R
.

En effectuant la somme des deux bilans, on a : P
op
=
(
)
c1 c0
d E E
dt
+
+ P
R
=
c1
dE
dt
+ P
R
Par l’intermédiaire du phénomène d’induction, la puissance fournie par l’opérateur est
partiellement transmise à la barre T
1
sous forme d’énergie cinétique et partiellement dissipée
par effet Joule dans les résistances.
Induction 2
C’est le cas de Lorentz : conducteur mobile dans un champ magnétique constant.
La chute de la tige T va provoquer une variation de surface du rectangle. En présence d’un
champ magnétique B uniforme et constant, cette variation de surface va provoquer une
variation de flux magnétique qui par la loi de Faraday va induire l’apparition d’une f.e.m
d’induction dans le circuit. Comme le circuit est fermé, il apparaît aussi un courant
électrique induit d’intensité i. En présence de champ magnétique, ce courant va provoquer
une force de Laplace, F
L
, s‘exerçant sur la tige T.
Par la loi de Lenz, l’action de F
L
va s’opposer à la cause qui lui a donné naissance, i.e. la
variation de flux de B. Elle va donc freiner la tige pour que la surface varie moins vite.
Orientons l’espace et le circuit :
Pour l’espace, on choisit la base cartésienne directe (e
X
, e
Y
, e
Z
) définie par l’énoncé.
On a alors : B = B.(cosα.e
Z
– sinα.e
X
) et g = – g(cosα.e
Z
– sinα.e
X
) avec B > 0 et g > 0.
Pour le circuit, on choisit le sens trigonométrique qui oriente e, S et à l’occasion i.
S = ℓ.(X – X
I
).e
z
.
D’après notre orientation électrique, i et e doivent être négatives.
D’après notre orientation mécanique, F
L
.e
X
= F
LX
est négative.
Équation mécanique
Système : Tige T ; Référentiel : Terrestre supposé galiléen ;
Actions mécaniques : Le poids P = m.g ; la réaction des rails R ;
La force de Laplace F
L
=
T, sens de i
i.d
r
∫
∧ B
Relation fondamentale de la dynamique : m.a = P + R + F
L
.
Base et projections : On choisit la base cartésienne (e
X
, e
Y
, e
Z
) précédemment définie.
P = – m.g(cosα.e
Z
– sinα.e
X
) R = R
X
.e
X
+ R
Z
.e
Z
.

Par définition de la force de Laplace, F
L
=
T, sens de i
i.d
r
∫
∧ B.
Comme nous sommes en A.R.Q.S. et B est uniforme, nous pouvons sortir i et B de l’intégrale.
On obtient alors : F
L
= i.CD ∧ B avec CD = ℓ.u
Y
.
Finalement, F
L
= i.B.ℓ.(cosα.e
X
+ sinα.e
Z
). F
LX
et i sont bien de même signe.
Finalement, on obtient suivant l’axe u
X
: m
dv
dt
= i.B.ℓ.cosα + m.g.sinα.
Équation électromécanique
En tenant compte de l’orientation choisie, le flux de B vaut : Φ = ℓ.(X – X
I
).B.cosα > 0.
La loi de Faraday donne alors immédiatement : e = – ℓ.v.B.cosα < 0.
On retrouve bien l’analyse qualitative :
Équation électrique
En écrivant la loi des mailles sur notre circuit : e = R.i.
Comme prévu, i est négatives.
En rassemblant les équations :
m
dv
dt
= i.B.ℓ.cosα + m.g.sinα. e = – ℓ.v.B.cosα = R.i.
Puis, en éliminant la f.e.m. e et l’intensité i du courant induit, on obtient :
m
dv
dt
= m.g.sinα –
2 2 2
.B .cos
2R
α
ℓ
v
dv
dt
+
v
τ
=
v
τ
∞
avec τ =
2 2 2
m.R
.B .cos
α
ℓ
et v
∞
= τ.g.sinα.
La résolution de cette équation avec la condition initiale v(0) = 0 donne :
v(t) = v
∞
[1 – exp(–
t
τ
)].
Après le régime transitoire, la tige T a quasiment une vitesse constante.
Bilan en puissance
Pour faire un bilan en puissance mécanique, il faut reprendre l’équation mécanique et la
multiplier par v : [m
d
dt
v
= P + R + F
L
].v donne :
c
dE
dt
=
d
dt
(
2
1
mv
2
) = F
L
.v + m.g.v.
• P
poids
= m.g.v = –
c
dE
dt
est la puissance mécanique algébrique reçue par la tige de la
part de la pesanteur. E
p
est l’énergie potentielle de la tige.
• P
ind/méca
= F
L
.v est la puissance mécanique algébrique reçue par la tige de la part de
l’induction par l’intermédiaire de la force de Laplace ;
 6
6
1
/
6
100%