Modélisation et simulation d`un ascenseur entraıné par une machine

Mod´
elisation et simulation d’un ascenseur entraˆ
ın´
e
par une machine synchrone `
a aimants permanents
aliment´
ee par un banc de supercondensateurs
B. Blunier, A. Djerdir, A. Miraoui
Laboratoire de recherche en ´
electronique, ´
electrotechnique et syst`
emes, L2ES
Laboratoire mixte de recherche UFC et UTBM associ´
e`
a l’INRETS – noLRE-T31
UTBM (Bˆ
at. F) – Rue Thierry Mieg – F90010 Belfort
R´
esum´
e—Le but de cet article est de pr´
esenter les avantages de
la r´
ecup´
eration d’´
energie lors de la descente d’un ascenseur. Afin
d’´
eviter les probl`
emes de r´
einjection de l’´
energie dans le r´
eseau
´
electrique, le choix a ´
et´
e fait de r´
ecup´
erer cette ´
energie dans
des supercondensateurs. L’utilisation d’une machine synchrone
`
a aimants permanents sans r´
educteur permet d’obtenir un
rendement et une compacit´
e bien meilleurs que les solutions
d´
ej`
a existantes. Une mod´
elisation ainsi que les r´
esultats de la
simulation d’un tel syst`
eme sont pr´
esent´
es.
Mots cl´
es—Machine synchrone `
a aimants permanents, ascenseur,
supercondensateurs, hacheur, onduleur de tension, r´
ecup´
eration
d’´
energie.
I. INTRODUCTION
Les supercondensateurs repr´
esentent une des derni`
eres in-
novations concernant les composants d´
edi´
es au stockage de
l’´
energie. Ces derniers sont tr`
es adapt´
es aux applications
n´
ecessitant une forte sollicitation en puissance pendant des
temps tr`
es courts et comprenant de nombreux cycles de
charges-d´
echarges.
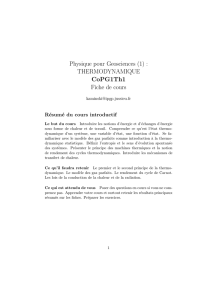
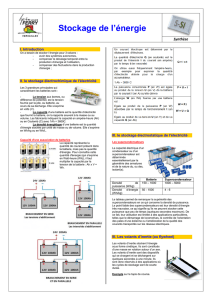
Le domaine ´
energie-puissance des supercondensateurs
(Fig. 1) se situe entre celui des accumulateurs ´
electrochimiques
et des condensateurs classiques.
Condensateurs
Hybrides
Supercondensateurs
Accumulateurs
106
107
10−310−210−11 101102103
Puissance massique (W/kg)
Energie massique (Wh/kg)
101
102
103
104
105
Fig. 1. Diagramme de Ragone [8] : comparatif des performances des
condensateurs, supercondensateurs et accumulateurs
Malgr´
e leur faible densit´
e´
energ´
etique par rapport aux accu-
mulateurs classiques, les supercondensateurs peuvent r´
epondre
aux besoins de nombreux syst`
emes ´
electriques. Tel est le
cas par exemple des ascenseurs [3] : durant les phases
d’acc´
el´
eration, la sollicitation en puissance est ´
elev´
ee. L’ali-
mentation d’un ascenseur par un banc de supercondensa-
teurs permettrait de restituer l’´
energie lors de la descente,
´
evitant ainsi de dissiper l’´
energie dans des r´
esistances de
freinage ou d’ˆ
etre confront´
e aux probl`
emes li´
es `
a la r´
einjection
d’´
electricit´
e dans le r´
eseau (tarification, pollution du r´
eseau
´
electrique etc.). La seule ´
energie `
a fournir serait donc la com-
pensation des pertes du syst`
eme. Cette ´
energie pourrait ˆ
etre
fournie par une source secondaire telle que le r´
eseau ´
electrique,
une pile `
a combustible ou des ´
energies renouvelables (solaire,
´
eolien etc.).
L’entraˆ
ınement de l’ascenseur par une machine synchrone `
a
aimant permanents (MSAP) sans r´
educteur permettrait d’une
part d’augmenter le rendement du syst`
eme — les ascenseurs
classiques sont ´
equip´
es de machines avec r´
educteurs — et de
diminuer de 70 % (cas de l’ascenseur GeN2 du constructeur
Otis) l’encombrement occup´
e par le local machine.
Cet article d´
ecrit la mod´
elisation et la simulation d’un
ascenseur entraˆ
ın´
e par une MSAP sans r´
educteur aliment´
ee
par un banc de supercondensateurs. Le cahier des charges du
syst`
eme sera bas´
e sur les caract´
eristiques de l’ascenseur GeN2.
II. PR´
ESENTATION DU SYST`
EME
A. Syst`
eme global
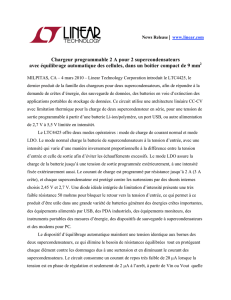
Le syst`
eme `
a simuler (Fig. 2) peut se d´
ecomposer en quatre
sous-syst`
emes :
– l’ascenseur repr´
esent´
e par un syst`
eme charge-contre-
poids;
– l’entraˆ
ınement comprenant la MSAP associ´
ee `
a son
convertisseur et sa commande;
– l’alimentation principale comprenant le banc de super-
condensateurs associ´
e`
a son convertisseur et sa com-
mande;
– l’alimentation secondaire (PAC, solaire, ´
eolien, r´
eseau
etc.).

r
==
Supercondensateurs
Mp
Mc
Ω+
==
MSAP
Solaire
PAC
R´
eseau.
etc.
Fig. 2. Sch´
ema du syst`
eme
B. Cahier des charges
Le cahier des charges utilis´
e pour effectuer la simulation
est inspir´
e de l’ascenseur GeN2 du constructeur Otis [1]. Les
caract´
eristiques sont donn´
ees par le tableau ci-dessous.
Caract´
eristiques de l’ascenseur
Charge (Mc) 630 kg
Vitesse (vc) 1 m/s
Course 40 m `
a 1,0 m/s
Rayon de la poulie (r) 10 cm
Acc´
el´
eration maximale (γmax)0,8±0,13 m/s2
III. MOD´
ELISATION DES SOUS-SYST`
EMES
A. Mod´
elisation du syst`
eme de masses
En effectuant un bilan des forces du syst`
eme charge-
contrepoids, il est possible de calculer le couple r´
esistant sur
le moteur :
Γr= (Mc−Mp)g r + (Mc+Mp)r2dΩ
dt (1)
Avec,
g: acc´
el´
eration terrestre;
Ω: vitesse de rotation de la MSAP.
Afin de minimiser la puissance maximale (ΓrΩ)`
a four-
nir pour lever la charge `
a vitesse constante (dΩ/dt = 0),
la masse du contrepoids doit ˆ
etre ´
egale `
a la moiti´
e de la
charge maximale. La masse du contrepoids sera donc ´
egale
`
a 315 kilogrammes d’apr`
es le cahier des charges.
B. Mod´
elisation de la MSAP
1) ´
Equations ´
electriques : le mod`
ele de la machine a ´
et´
e
r´
ealis´
e dans le rep`
ere de Park [9] et mis sous repr´
esentation
d’´
etat :
d
dt id
iq=A(Ω) id
iq+L−1vd
vq−0
p φfΩ (2)
O`
u
A(Ω) = L−1R(Ω)
R(Ω) = R−p LqΩ
p LdΩR
L=Ld0
0Lq
Avec,
Ld,Lq: inductances statoriques directe et en quadrature
dans le rep`
ere de Park;
id,iq: courants statoriques direct et en quadrature dans
le rep`
ere de Park;
φf: flux de l’aimant permanent;
vd,vq: tensions statoriques directe et en quadrature dans
le rep`
ere de Park;
R: r´
esistance statorique;
p: nombre de paires de pˆ
oles de la machine.
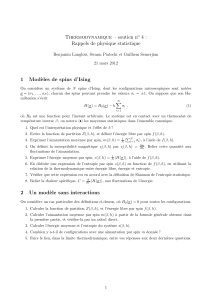
Les repr´
esentations symbolique et fonctionnelle de la MSAP
dans le rep`
ere de Park sont donn´
ees respectivement par
Fig. 3(a) et Fig. 3(b).
2) Expression du couple ´
electromagn´
etique : l’expression
du couple ´
electromagn´
etique de la MSAP est la suivante :
Γ = p(Ld−Lq)id+φfiq(3)
Si la machine est `
a pˆ
ole lisses comme c’est le cas dans
cette application, les inductances Ldet Lqsont ´
egales et
l’expression du couple ´
electromagn´
etique de la machine se
r´
eduit `
a l’expression suivante :
Γ = p φfiq(4)
On remarque dans l’expression (4) que le couple de la
MSAP `
a pˆ
oles lisses ne d´
epend plus du courant id. La strat´
egie
de commande consiste donc `
a maintenir le courant id`
a z´
ero
afin de limiter les pertes dans les r´
esistances de la machine.
3) ´
Equations m´
ecaniques : l’expression du couple
m´
ecanique de la MSAP est donn´
ee par l’´
equation suivante :
Γ = JdΩ
dt +fΩ+Γr(5)
Avec,
J: inertie du rotor de la machine synchrone;
f: coefficient de frottement m´
ecanique;
Γr: couple r´
esistant.
En remplac¸ant Γrpar son expression donn´
ee par (1),
l’expression de Γdevient :
J+ (Mc+Mp)r2dΩ
dt = Γ −fΩ+(Mc−Mp)g r (6)
2

NS
Lq,R
id
vd
vq
p θ
Ld,R
Axe de r´
ef´
erence
iq
(a) Repr´
esentation symbolique
0
p φf
1
s
Ω
Ω
vdq L−1
A(Ω)
−
+
−
+d idq/dt idq
(b) Repr´
esentation fonctionnelle
Fig. 3. Repr´
esentations de la MSAP dans le rep`
ere de Park
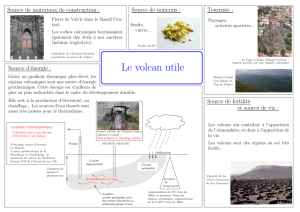
C. Mod´
elisation du banc de supercondensateurs
Un supercondensateur peut ˆ
etre mod´
elis´
e par le sch´
ema
donn´
e par Fig. 4
Rf
C1=C0+CV·V1
C2
C1
L R1
V1
R2
Fig. 4. Mod`
ele ´
equivalent d’un supercondensateur
Dans le mod`
ele, on distingue plusieurs parties [5] :
–la branche principale, repr´
esent´
ee par la r´
esistance R1
et le condensateur C1. Elle d´
etermine l’´
evolution de
l’´
energie pendant les cycles de charge et d´
echarge. La
valeur C1varie en fonction de la tension pr´
esente `
a ses
bornes : C1=C0+CV·V1;
–la branche lente, repr´
esent´
ee par la r´
esistance R2et le
condensateur C2. Elle intervient lors du ph´
enom`
ene de
redistribution des charges internes du composant interve-
nant `
a la fin de charge ou de la d´
echarge;
–l’inductance L, de l’ordre de quelques nano-henrys. Elle
repr´
esente la limitation en fr´
equence du composant et
peut ˆ
etre n´
eglig´
ee dans la plupart des applications;
–la r´
esistance Rf, de l’ordre de quelques kilo-ohms. Elle
repr´
esente la r´
esistance de fuite du composant.
IV. TOPOLOGIE ET COMMANDE DES CONVERTISSEURS
STATIQUES
A. Convertisseur statique associ´
e`
a la MSAP
Une strat´
egie de contrˆ
ole `
a couple maximal de la machine
synchrone n´
ecessite un contrˆ
ole direct des courants de la
machine [7]. L’utilisation d’un bus continu en amont de
l’onduleur impose l’utilisation d’un onduleur de tension.
La topologie retenue est donc un onduleur de tension
contrˆ
ol´
e en courant (Fig. 5(a)). Les courants seront trait´
es
dans le rep`
ere de Park afin de r´
eguler des grandeurs conti-
nues, ´
evitant ainsi les probl`
emes li´
es aux suivi des consignes
sinuso¨
ıdales `
a fr´
equence variable [7] (Fig. 5(b)).
T1T2T3
T0
1T0
2T0
3
MSAP
θψ
D´
etection de la
position du rotor
Autopilotage et
d´
ephasage
(a) Topologie du convertisseur : convertis-
seur de tension
T0
3
+
−
P I
θ
Park
2→3
idq
ia,b,c Park
3→2
θ
+
−
idqref
vccons
vbcons
vacons
T1
T0
1
T2
T0
2
T3
(b) Commande de la MSAP : contrˆ
ole des courants dans le rep`
ere de
Park
Fig. 5. Choix de la topologie et de la commande de la MSAP
B. Convertisseur associ´
e au banc de supercondensateurs
La topologie permettant d’assurer l’´
echange d’´
energie entre
le banc de supercondensateurs et le bus continu est un hacheur
´
el´
evateur-abaisseur (Fig. 6(a)). Le but du hacheur est de main-
tenir une tension constante sur le bus continu : un r´
egulateur
proportionnel-int´
egral a ´
et´
e utilis´
e (Fig. 6(b)).
V. ´
EL´
EMENTS DE DIMENSIONNEMENT
A. Choix des param`
etres de la MSAP
Le choix des param`
etres de la machine porte sur le produit
p φf. Afin de faire ce choix, on part de la contrainte suivante :
le rendement de la machine fonctionnant en g´
en´
eratrice doit
ˆ
etre une valeur cible ηG(fonction objectif). Ce rendement doit
3

ibus
L1
T1
T2
vbus
C1
vscap
iscap
(a) Hacheur ´
el´
evateur-abaisseur
vbusref
−
iscap
Kph +Kih
s
iscapref
T1
T2
+
−
vbus
+
(b) Sch´
ema de commande et de r´
egulation de la tension du bus
continu vbus
Fig. 6. Topologie et commande du convertisseur associ´
e au banc de
supercondensateurs
ˆ
etre obtenu quand l’ascenseur est `
a vitesse constante (on ne
tiendra pas compte de la phase d’acc´
el´
eration).
Le rendement de la machine en fonctionnement g´
en´
erateur
s’´
ecrit (en limitant les pertes aux seules pertes ´
electriques dans
les r´
esistances de la machine),
ηG=−Puissance m´
ecanique −Pertes
−Puissance m´
ecanique (7)
=−Γ Ω −R i2
q
−Γ Ω (8)
Remarque 1 : la valeur de la puissance m´
ecanique est
n´
egative en fonctionnement g´
en´
erateur. Il faut donc, dans le
calcul du rendement, affecter la puissance m´
ecanique du signe
moins.
`
A vitesse constante Ωmax, le couple r´
esistant Γret le couple
´
electromagn´
etique Γsont ´
egaux et d’apr`
es (1) et (4),
Γ=Γr(9)
p φfiq=fΩmax + (Mc−Mp)r g (10)
L’expression du courant iqest donc,
iq=fΩmax + (Mc−Mp)r g
p φf(11)
On en d´
eduit donc l’expression du produit p φfen utilisant
(9), (11) et (7),
p φf=v
u
u
t
R(Mc−Mp)r g−fΩmax
(ηG−1) Ωmax (12)
Si on choisit par exemple, un rendement de 95 %, et en
prenant R= 0,02 Ω et f= 0,01 N.m.s.rad−1(les autres
valeurs sont fix´
ees par le cahier des charges), on obtient,
p φf= 3,51. Ce dimensionnement assure qu’il y aura
effectivement r´
ecup´
eration d’´
energie lors de la descente de
l’ascenseur.
B. Dimensionnement du banc de supercondensateurs
Le dimensionnement a ´
et´
e r´
ealis´
e`
a l’aide du programme
mis a disposition par le constructeur maxwell [2].
Les param`
etres suivants ont ´
et´
e choisis :
– tension maximale : vscapmax = 100 V ;
– tension minimale : vscapmin = 50 V;
– courant moyen : hiscapi ≈ 40 A;
– temps de d´
echarge (charge) : Tch = 42 s.
Le r´
esultat propos´
e par le programme est le suivant :
– nombre de supercondensateurs : n= 40 branch´
es en
s´
erie;
– capacit´
e d’un supercondensateur : 2 700 F;
– r´
esistance s´
erie d’un supercondensateur : 1mΩ;
– capacit´
e du syst`
eme : C= 67,50 F (C= 2 700/n);
– r´
esistance du syst`
eme : R= 0,04 Ω (n·1mΩ).
VI. SIMULATION DU SYST `
EME GLOBAL
La simulation du syst`
eme global (Fig. 7) a ´
et´
e r´
ealis´
ee dans
le cas le plus d´
efavorable :
– la charge est maximale : Mc= 630 kg ;
– la course est maximale : 40 m;
– l’acc´
el´
eration est maximale : γmax = 0,8m.s−2;
– la vitesse est maximale : vc= 1 m/s (Ωmax = 10 rad/s).
vscap
T1T2T3
T0
1T0
2T0
3
MSAP
θψ
D´
etection de la
position du rotor
Autopilotage et
d´
ephasage
C1
T2
T1
L1
ibus
iscap
vbus
Ω+
−→
Pc
−→
Pp
Mp
r
Mc
Fig. 7. Sch´
ema du syst`
eme global
t(s)
50
100
150
200
250
300
350
400
0 10 20 30 40 50 60 70 80
vbus (V)
0
Fig. 8. Tension du bus continu vbus
On constate que la tension du bus (Fig. 8) est constante
quelque soit le courant absorb´
e par la machine et quelque
soit la tension du banc de supercondensateurs. Le bloc de
r´
egulation du hacheur remplit bien son rˆ
ole. Le profil de la
4

γmax
mont´
ee descente
Ωmax
-10
0 10 20 30 40 50 60 70 80
Ω(rad/s)
t(s)
5
0
-5
10
Fig. 9. Profil de la vitesse
t(s)
-30
-20
-10
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80
iscap (A)
-40
Fig. 10. Courant des supercondensateurs iscap
vitesse, le courant des supercondensateurs et la tension du
banc de supercondensateurs sont donn´
es respectivement par
Fig. 9, Fig. 10 et Fig. 11. La tension vscap donn´
ee par Fig. 11
nous permet de calculer l’´
energie contenue dans le banc de
supercondensateurs (1/2C v2
scap)
Le bilan ´
energ´
etique du syst`
eme donne les r´
esultats sui-
vants :
t(s)
80
85
90
95
100
0 10 20 30 40 50 60 70 80
vscap (V)
75
Fig. 11. Tension du banc de supercondensateurs vscap
–´
Energie stock´
ee1dans le banc de supercondensateurs au
d´
epart : Einit = 337,5kJ;
–´
Energie restante en fin de mont´
ee : EH= 189,8kJ
(l’´
energie d´
epens´
ee est donc ´
egale `
a147,7kJ);
–´
Energie disponible apr`
es la descente : Efin = 291,9kJ
(l’´
energie restitu´
ee est donc ´
egale `
a102,1kJ);
L’´
energie r´
ecup´
er´
ee dans les supercondensateurs `
a la fin de
la simulation est donc ´
egale `
a86,5% de l’´
energie qui ´
etait
disponible au d´
epart.
L’´
energie `
a fournir pour effectuer un nouvel aller-retour
dans les mˆ
emes conditions et en repartant des conditions
initiales sera donc de 45,6kJ contre 147,7kJ s’il n’y avait
pas eu de r´
ecup´
eration d’´
energie.
Remarque 2 : toutes les pertes n’ont pas ´
et´
e incluses dans
le mod`
ele et les valeurs des r´
esistances de la machine ont ´
et´
e
fix´
ees arbitrairement (un dimensionnement physique permet-
trait de les calculer). Le rendement ´
energ´
etique pr´
esent´
e ici
(η= 86,5%) n’est donc pas un rendement qui serait obtenu
avec un syst`
eme r´
eel. Cependant, on pourra s’attendre `
a un
rendement r´
eel ´
elev´
e (machine ´
electrique sans r´
educteur).
VII. CONCLUSION
Dans cet article, nous avons pr´
esent´
e les premiers r´
esultats
d’un syst`
eme de r´
ecup´
eration d’´
energie `
a base d’une machine
synchrone `
a aimants permanents et d’un banc de superconden-
sateurs. Les r´
esultats de simulation d´
emontrent la faisabilit´
e
d’un tel syst`
eme.
Les prochaines ´
etapes du travail consisteront `
a dimension-
ner physiquement la machine synchrone et d´
eterminer les
param`
etres ´
electriques r´
eels en utilisant la condition sur le
rendement (12) pr´
esent´
ee dans cet article. La r´
ealisation d’une
maquette `
a´
echelle r´
eduite est en cours afin de valider les
r´
esultats.
LISTE DES SYMBOLES
Lettres grecques
ΓCouple ´
electromagn´
etique de la MSAP
γmax Acc´
el´
eration maximale de l’ascenseur
ΓrCouple r´
esistant dˆ
u aux masses
ηGRendement de la MSAP en fonctionnement
g´
en´
eratrice
φfFlux cr´
e´
e par l’aimant permanent
ΩVitesse de rotation de la MSAP
Lettres romaines
CCapacit´
e du banc de supercondensateurs
Efin ´
Energie disponible `
a la fin d’un aller-retour de
l’ascenseur
EH´
Energie restante dans le banc de supercondensa-
teurs `
a la fin de la mont´
ee
Einit ´
Energie maximale stock´
ee dans le banc de super-
condensateurs
1Toute l’´
energie stock´
ee dans un supercondensateur n’est pas utilis´
ee `
a
cause des contraintes sur le rendement. C’est pourquoi le banc de supercon-
densateurs n’a pas ´
et´
e dimensionn´
e pour avoir une tension finale nulle. Pour
plus d’explications, on pourra se reporter `
a [4].
5
 6
6
1
/
6
100%