Electrotechnique

Electrotechnique
BSISSA Abdessalem
Université virtuelle de tunis
2006

Introduction
Ce module porte sur l'électrotechnique. Il couvre plus spécifiquement :
Les machines à courant continu.
Les transformateurs.
Le module s'adresse d'abord aux étudiants en deuxième semestre de formation
des ISET. Il s'inscrit dans le programme du Diplôme de Technicien Supérieur en
Génie électrique (option: électricité industrielle et électronique).
Ce « Guide d'étude » a pour objectif de vous préparer à suivre le cours. Il définit
en quelque sorte un mode d'emploi, non seulement pour le matériel didactique
du cours, mais aussi pour le cheminement que vous devez adopter et les
différentes exigences auxquelles vous devez répondre.
Bonne lecture et bon cours!


Cours délectrotechnique E2
I .S.E.T de Gabès Mr BSISSA.A
1

Cours délectrotechnique E2
I .S.E.T de Gabès Mr BSISSA.A
2
ETUDES PRELIMINAIRES
I.1. Généralités.
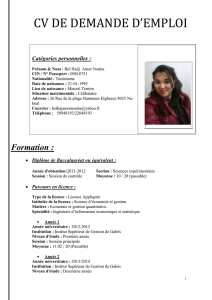
•Génératrice
Figure 1.1
La génératrice transforme lénergie mécanique en énergie électrique à tension et
courant continu.
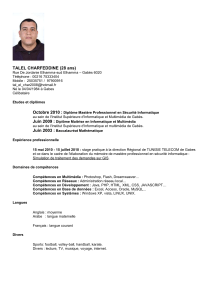
•Moteur
Figure 1.2
Inversement, le moteur est alimenté par une tension continue et fournie de lénergie
mécanique. En conclusion les machines à courant continu sont réversibles.
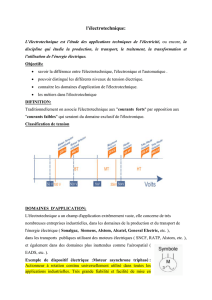
I.2. Description générale
Une machine à courant continu se décompose en deux parties principales :
- Lune fixe, appelée inducteur est un électro-aimant
- Lautre mobile, appelée induit
Figure 1.3
GPélectrique=U.I (continu)
M
Pélectrique=U.I (continu) Pméc=C.
N S
Stator=inducteur
D
C
E
EP
NP
B
Corne polaire
balai
collecteur
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
1
/
65
100%