Preparation of Papers in Two-Column Format for the - Revue e-STA

Modélisation Multi-physiques d’un actionneur linéaire
incrémental pour la motorisation d’une pousse-seringue
Imen Saidi 1, Lilia El Amraoui Ouni1, 2 et Mohamed Benrejeb 1
1 Unité de Recherche LARA Automatique, Ecole Nationale d’Ingénieurs de Tunis, BP37, le Belvédère, 1002, Tunis.
2 Ecole Supérieure de Technologie et d’Informatique, 45 rue des entrepreneurs Charguia 2, 2035 Tunis-Charthage
E-mail: imen.saidi@gmail.com, [email protected]nu.tn, mohamed.benrejeb@enit.rnu.tn
Résumé — Dans ce papier, est développé un modèle multi-
physiques d’un actionneur incrémental linéaire à réluctance
variable, dédié à la motorisation d’une pousse-seringue pour la
perfusion d’un médicament incompressible parfait. Ce modèle est
composé de plusieurs modèles couplés. représentant chacun un
phénomène physique particulier.
La modélisation multi-physiques élaborée exploite des méthodes
analytiques pour les modélisations électrique, mécanique et celle
de la charge, et des méthodes semi-analytiques à base de réseaux
de réluctances pour le cas de la modélisation du modèle
magnétique.
Mots-clés- Pousse-seringue, perfusion, médicament incompressible
parfait, actionneur linéaire incrémental, modélisation
multi-physique, réponse dynamique.
NOTATIONS
, , ,a b c d
Grandeurs relatives aux phases de l’actionneur
quatriphasé
n
D
Diamètre de l’aiguille
s
D
Diamètre de la seringue
c
F
Force de charge
0
f
Coefficient du frottement sec
z
F
Force de poussée
i
Courant statorique dans une phase
L
Inductance propre d’une phase statorique
m
Masse de la partie mobile et de la charge
M
Inductance manuelle d’une phase statorique
P
Pression exercé sur le piston
p
P
Pression exercée à l’intérieur de la seringue sur le piston
mus
P
Pression musculaire
o
P
Pression à la sortie de l’aiguille
v
Q
Débit volumique du médicament
R
Résistance d’une phase statorique
s
S
Section de la seringue
U
Tension efficace appliqué à la phase statorique
z
Position linéaire de l'actionneur
Masse volumique du médicament
Cœfficient du frottement visqueux
Perméabilité magnétique du matériau
1
V
Vitesse du fluide dans la seringue
2
V
Vitesse à la sortie de l’aiguille.
I. INTRODUCTION
Les pousse-seringues électriques permettent de perfuser de
manière lente et continue une solution médicamenteuse dans
l’organisme à des fins thérapeutiques ou de diagnostiques.
Elles permettent aussi de transfuser des constituants du sang
tels que plasma, plaquettes, concentré globulaire...
Dans le cas de maladies cardio-vasculaire et neurologique par
exemple, le traitement par injection intraveineuse de solution à
longue durée, à débit réglable et à rythme précis [1], nécessite
la mise en place de seringues automatiques programmables,
pouvant être reliées à un réseau central de surveillance. Ces
pousses-seringues électriques sont généralement conçues
autour d’actionneurs incrémentaux pouvant être rotatifs ou
linéaires [2]. Ceux-ci présentent une grande fiabilité, une
bonne dynamique du mouvement ainsi qu’une simplicité de
structure mécanique ce qui leur a permis de s’imposer de plus
en plus dans diverses applications de haute précision [3].
Par ailleurs, l’utilisation d’actionneurs incrémentaux linéaires,
se prête bien aux applications qui demandent un déplacement
rectiligne. En effet, elle permet de simplifier la chaîne de
transmission, en supprimant les organes intermédiaires de
transformation de mouvement, qui sont nécessaires lorsque des
actionneurs de type rotatif sont utilisés [4], [5].
Dans ce sens, nous nous intéressons à la modélisation d’un
actionneur linéaire incrémental afin d’étudier son
comportement dynamique lorsqu’il motorise une pousse
seringue de perfusion d’un médicament incompressible parfait.
e-STA copyright 2010 see
Volume 7, N°2, pp 40-45

Pour ce faire, un modèle électrique, un modèle mécanique, un
modèle magnétique ainsi qu’un modèle de charge sont élaborés
pour ce type de système puis couplés entre eux afin de tenir
compte des interactions pouvant exister.
II. PRESENTATION DU POUSSE-SERINGUE ELECTRIQUE
La Pousse-Seringue Electrique (PSE) est un appareil
d’injection ou de perfusion, à usage médical, elle est utilisée
lorsque le patient est dans l’incapacité d’avaler des
préparations orales, ayant un problème d’absorption gastro-
intestinale, ou lorsque son état général ne lui permet pas une
prise normale de médicaments. Les principaux vaisseaux
utilisés pour la perfusion sont [1] :
- Les veines périphériques : principalement les veines du dos
de la main, veines de l’avant-bras ou du bras, veine saphène
interne à la malléole. Chez le petit enfant, les veines
épicrâniennes peuvent être utilisées.
- Les veines centrales : la veine jugulaire interne, située au
niveau du cou, la veine fémorale, qui chemine dans le
triangle de Scarpa (cou, pointe de l’épaule, sein), la veine
sous-clavière, étendue de la base du cou jusqu’au bras.
Les plages de débits de perfusion du médicament peuvent
varier de 0.1 ml/h à 99.99 ml/h [2], les volumes des seringues
les plus couramment utilisées sont de 5 ml, 10 ml, 20 ml,
30 ml et 50 à 60 ml.
La pousse-seringue électrique combine des parties mécaniques,
électriques et électroniques de commande. La partie mécanique
sert de support pour les différents types de seringues. Il
comprend également un système de capteurs qui permettent de
vérifier la bonne position de fixation du piston. Le piston du
PSE est couplé directement au système de motorisation, qui va
littéralement pousser le contenu de la seringue vers le circuit
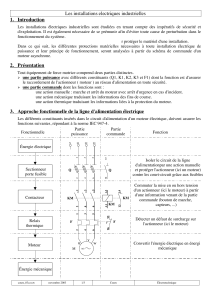
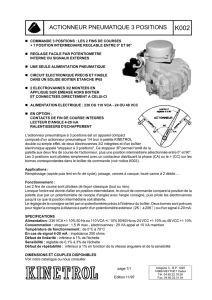
patient. Cette partie mécanique est mue par un actionneur
incrémental linéaire à réluctance variable de structure
géométrique tubulaire, composé par une succession en cascade
de quatre modules statoriques, A, B, C et D, séparés par des
anneaux amagnétiques, Fig.1. La partie mobile de l’actionneur
portée en translation, est régulièrement dentée.
Les dents et les encoches du mobile et du module statorique
sont identiques et de même largeur. Ces caractéristiques
assurent la régularité du pas. La force de poussée de
l’actionneur est de 2 N avec une course utile d’environ
100 mm et un pas élémentaire de 1 mm. Enfin la partie
électronique de commande permet de contrôler les débits et les
pressions et aussi de gérer les alarmes et d'effectuer de
nombreux calculs de doses en fonction des protocoles de
perfusion.
Actionneur incrémental linéaire Seringue
Support de fixation
Fluide médical
AC
BD
FIG. 1 : SYNOPTIQUE DU POUSSE-SERINGUE ELECTRIQUE
III. MODELISATION MULTI-PHYSIQUE DE L’ACTIONNEUR
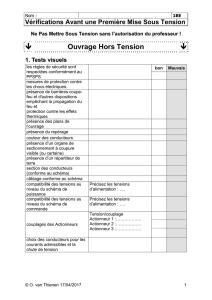
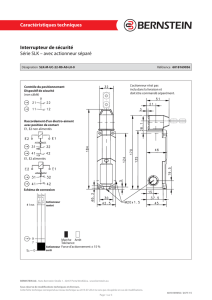
Le modèle multi-physique de l’actionneur incrémental de
motorisation du pousse seringue est en fait composé de
plusieurs modèles interagissant entre eux. Chacun de ces
modèles est construit à partir d’approches analytiques ou semi-
analytiques, et est destiné à représenter un phénomène
physique. Ainsi le modèle multi-physique peut se décomposer
en quatre modèles (Fig.2.), nous étudierons tout d’abord le
modèle électrique, ensuite, le modèle magnétique qui permet
de déterminer les évolutions de la force de poussée et de
l’inductance en fonction de la position du mobile, Puis la
charge de l’actionneur est modélisée. Enfin le modèle
mécanique permet de simuler le comportement dynamique de
l’actionneur.
Fig. 2 : Modèle multi-physique de l’actionneur linéaire incrémental
e-STA copyright 2010 by see
Volume 7, N°2, pp 40-45

Le modèle multi-physique de l’actionneur est alors décrit par le
schéma de la figure 2.
A. Modèle électrique
La tension induite aux bornes des phases A, B, C ou D, de
l’actionneur linéaire incrémental à réluctance variable sont
déduites des lois de Faraday et de Lenz par [6] :
, , , , , , , , , , , ,a b c d a b c d a b c d a b c d
d
U R i dt
(1)
Ou
est le flux totalisé vu par une phase statorique est décrit
par l’équation suivante [6]:
, , , , , , , , ,a b c d a b c d a b c d
Li
(2)
La matrice caractérisant les inductances des quatre phases en
régime linéaire est donnée par :
aa ab ac ad
ba bb bc bd
ca cb cc cd
da db dc dd
L M M M
M L M M
LM M L M
M M M L
(3)
Les phases statoriques sont magnétiquement découplées, les
inductances mutuelles sont nulles, les inductances des quatre
phases sont identiques. La matrice (3) peut alors être réécrite
sous la forme suivante :
( ) 0 0 0
0 ( ) 0 0
0 0 ( ) 0
0 0 0 ( )
Lz
Lz
LLz
Lz
(4)
D’après les équations (1), (2), (3) et (4) les quatre équations
décrivant le comportement électriques de l’actionneur sont :
A
A A A
di L dz
U Ri L i
dt z dt
(5)
B
B B B
di L dz
U Ri L i
dt z dt
(6)
C
C C C
di L dz
U Ri L i
dt z dt
(7)
D
D D D
di L dz
U Ri L i
dt z dt
(8)
B. Modèle magnétique
Le modèle magnétique élaboré pour l’actionneur est de type
réseau de réluctances. Chaque réluctance est déterminée à
partir de la répartition des tubes de flux à l’intérieur du circuit
magnétique, la modélisation consiste à repérer les principaux
tubes de flux, est à leur associer des réluctances dont les
valeurs dépendent du matériau magnétique d’une part et de la
géométrie du tube de flux d’autre part. Chaque réluctance est
calculée à partir de l’équation suivante [7]:
B
A
dl
S
(9)
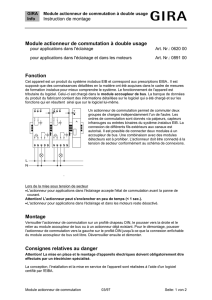
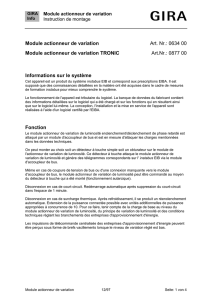
Le circuit magnétique décrit par un module élémentaire de
l’actionneur peut être modélisé par le réseau de reluctance de la
Figure 3, en supposant que la perméabilité du fer est constante
et que les effets de frange et d’extrémités sont négligeables.
La figure 3, présente le flux
créé dans le circuit magnétique,
, , ,
c a ds dm
sont respectivement la réluctance de la
culasse, celle de l’arbre du mobile, celle d’une dent du stator et
celle d’une dent du mobile et
e
représente la réluctance
d’entrefer proportionnelle à la zone de recouvrement entre une
dent du mobile et d’une dent du stator.
Rds
Rds
Rdm Rdm
Re
Re
Ra
RcNi
Fig.3. Modèle réseau de réluctances
1. Calcul de l’inductance
Les inductances statoriques seront calculées à partir du modèle
réseau de réluctances. Cette méthode présente l’avantage de
permettre de calculer analytiquement l’inductance d’une phase
à partir des dimensions géométriques. L’expression de
l’inductance est décrite par l’équation suivante [8]:
2
() éq
N
Lz
(10)
Avec N le nombre de spires du bobinage d’une phase et
éq
la
réluctance équivalente du circuit magnétique d’une phase qui
est décrite par l’équation suivante:
2 2 2
éq c ds dm e a
(11)
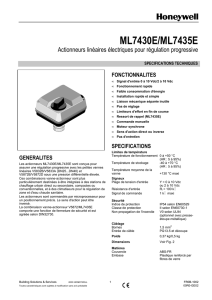
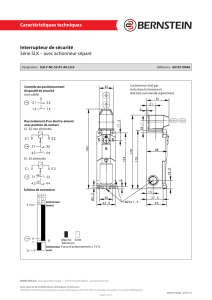
La figure 4 représente la variation de l’inductance en fonction
du décalage entre les dents du stator et celles du rotor. Lorsque
celles-ci sont alignées, la réluctance est minimal et
l’inductance est maximal, lorsqu’elles sont en quinconce deux
la réluctance est maximal l’inductance est minimale.
e-STA copyright 2010 by see
Volume 7, N°2, pp 40-45

-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Decalage ( % )
Inductance ( H )
Position de
quinconce Position de
quinconce
Position
aligné
Fig.4. Evolution de l’inductance en fonction du décalage
2. Calcul de la force de poussée
La force de poussée est créée à partir de la variation de la
réluctance d’entrefer. En effet, chaque changement de la
position du mobile engendre une force calculée à partir de
deux positions décalées entre elles de 2% de la largeur de dent.
La force de poussée est alors calculée à partir de l’équation
suivante [7]:
2
1
,2
m
i cst
Lz
F i z i
z
(12)
La figure 5 représente l’évolution de la force motrice en
fonction du décalage, D’une part, lorsque les deux dents sont
alignés, la force est nul, d’autre part, pour des décalages de
50% des deux dents la force est maximale.
-0.5 -0.4 -03 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Decalage ( % )
Force de poussée ( N )
Fig.5. Evolution de la force motrice en fonction du décalage
C. Modèle de la charge
Le médicament perfusé a la caractéristique d’un fluide
incompressible parfait où la viscosité du liquide contenue dans
la seringue est nulle. En effet le profil de vitesse est uniforme
dans la section droite de l’écoulement. L’expression de la force
de charge pour ce type d’écoulement est décrite par l’équation
suivante :
cs
F PS
(13)
L’expression de la pression P à l’équilibre du piston à vitesse
constante, est décrite par l’équation suivante:
p mus o
P P P P
(14)
La pression Pp exercé sur le piston, est déterminée à partir de
l'équation de Bernoulli pour l’écoulement d’un fluide
incompressible parfait [9].
22
1 1 2 2
11
22
po
gz P V gz P V
(15)
La seringue est maintenue horizontale donc
12
zz
.
La vitesse
12
VV
, donc la vitesse dans la seringue V1 est
nulle [9], [10], l’équation (15) peut donc être réécrite sous la
forme suivante :
2
2
1
2
po
P P V
(16)
L’expression de la vitesse du fluide à la sortie de l’aiguille est
décrite par l’équation suivante :
22
4v
n
Q
VD
(17)
D’après les équations (13), (16) et (17), l’expression de la force
de poussée pour un écoulement d’un fluide parfait
incompressible est donnée par l’équation suivante :
22
24
84
vs
c mus n
QD
FP D
(18)
La figure 6, présente l’évolution de la force de charge en
fonction du débit
0 0.5 1 1.5 2 2.5 3
x 10-8
1.66
1.665
1.67
1.675
1.68
1.685
1.69
1.695
1.7
1.705
Débit (m3/s)
Force de charge (N)
Fig.6. Evolution de la charge en fonction du débit
D. Modèle mécanique
Le comportement dynamique de l’actionneur linéaire
incrémental est décrit par l’équation différentielle du second
ordre suivante [3], [7] :
2
0
2( , ) c
d z dz dz
m F i z f signe F
dt dt
dt
(19)
e-STA copyright 2010 by see
Volume 7, N°2, pp 40-45

L’actionneur considéré au cours des simulations en charge est
caractérisé par les paramètres mécaniques suivants:
m=1 kg ; ξ=25 Nsm-1 ; f0=0.01 N
La résolution du modèle dynamique décrit par (19) en
appliquant l’algorithme de Range Kutta à l’ordre 4 sous
l’environnement Matlab permet de déterminer l’évolution de la
position z du mobile en fonction du temps t en tenant compte
de l’évolution de la force de charge Fc.
E. Couplage des modèles
Le système couplé est constitué des modèles électriques,
magnétique et de charge élaborés et en interdépendance, Fig.2.
Le couplage des différents modèles est pris en compte à travers
les évolutions de la force de poussée et de l’inductance de
phase. Les équations des phénomènes à modéliser sont alors
résolues simultanément.
Les paramètres décrivant la charge de la pousse-seringue sont
donnés par le tableau suivant :
TABLE I
PARAMETRES DE LA CHARGE
Paramétres
Valeur
Cc (ml)
60
Dn(mm)
3
Ds(mm)
23
Pmus(mmHg)
15
Po (bar)
1
Qv (ml/h)
10
3
( . )kg m
1000
Les figures 9, 12 et 10 présentent respectivement les allures du
courant des quatre phases, la vitesse de déplacement et la force
de poussée dynamique développée par l’actionneur.
La figure 11 présente la réponse dynamique de l’actionneur,
des oscillations angulaires apparaissent autour de la position
d’équilibre finale, ces oscillations sont issues de l’énergie
cinétique accumulée par la partie mobile au cours du
déplacement [10]. Les oscillations sont amorties plus au moins
rapidement par les effets des frottements de toutes natures,
parmi lesquels on peut citer [11]:
le frottement sec,
le frottement visqueux,
une partie des pertes fer et des pertes joules associées à la
tension induite de mouvement.
Ces oscillations sont défavorables dans la mesure où un
positionnement précis et sans dépassement est requis.
IV. CONCLUSION
Les travaux présentés dans cet article décrivent l’élaboration
du modèle multi-physiques d’un actionneur, composé des
modèles électrique, magnétique, mécanique et de charge. Le
couplage de ces modèles est réalisé en vue de l’étude du
comportement dynamique de l’évolution des courants des
quatre phases, de la force de poussée, de la position et de la
vitesse de l’actionneur linéaire incrémental. Le système global
modélisé constitue une nouvelle application des actionneurs
incrémentaux linéaires dans le domaine biomédical.
Nous envisageons de poursuivre ces travaux essentiellement
dans le sens de l’élaboration de stratégies de commande
adaptées à ce type de systèmes, permettant de réduire les
oscillations en présence.
REFERENCES
[1] J.F Loriferne, M. Saada et F. Bonnet, “Abords veineux centraux-
Techniques en réanimation,” Edition MASSON, 1990.
[2] C. Kahwati, “Cas concrets corrigés: calculs de dose,” Edition Lamarre,
Paris 2001.
[3] I. Saidi, L.El Amraoui et M.Benrejeb “Etude de l’influence de la
caractéristique de force de poussée sur la réponse dynamique d’un
actionneur linéaire incrémental,” 5éme Conférence International JTEA
2008, Hammamet, Mai 2008.
[4] M. Sakamoto, “PM type 3 phases stepping motors and their development
to the linear stepping motors,” 4th International Symposium on Linear
Drives for Industry Application, LDIA 2003, September, Birmingham,
pp. 435-438.
[5] P. Jinupun et P.C. Luk, “Direct work control for linear switched
reluctance motor drive,” 4th International Symposium on Linear Drives
for Industry Application, LDIA 2003, September, Birmingham,
pp. 387-390.
[6] G. Remy, “ Commande optimisée d'un actionneur linéaire pour un axe
de positionnement rapide,” Thèse de Doctorat, Ecole Nationale
Supérieure d'Arts et Métiers - ParisTech (ENSAM), Décembre 2007.
[7] L. EL Amraoui,"Conception électromagnétique d’une gamme
d’actionneurs linéaires tubulaires à réluctance variable", Thèse de
Doctorat, Ecole Centrale de Lille, 2002.
[8] J. Gomand, “Modélisation, Identification Expérimentale et Commande
d'un Moteur Linéaire Synchrone à Aimants Permanents -Etude des
inductances”, Mémoire de Master Recherche Energie Electrique et
Développement Durable, Ecole Nationale des Arts et Métiers, Juin 2005.
[9] A.B. Baker et J.E. Sanders, “Fluid Mechanics Analysis of a
Spring-Loaded Jet Injector”, IEEE Transactions on Biomedical
Engineering, vol.26:2, pp. 235-242, February 1999.
[10] D.M. Wendell, B.D. Hemond, N. Cathy Hoang, A.J. Taberner
et I. W. Hunter, “The Effect of Jet Parameters on Jet Injection”,
Proceedings of the 28th Annual International Conference of the IEEE
EMBS, New York City, USA, pp.5005-5008, August 30-September 3,
2006.
[11] G. Grellet et G. Clerc, “Actionneurs électriques, principes/ Modèles/
Commande,” Edition Eyrolles, Paris 1997.
e-STA copyrignt 2010 by see
Volume 7, N°2, pp 40-45
 6
6
1
/
6
100%