TP Hacheur - Sites de PE LEROY

Lycée Brizeux
PSI Travaux pratiques de Physique-Chimie
TP Hacheur
Capacités exigibles du programme :
Puissance électrique
— Mesurer une puissance moyenne à l’aide d’un
wattmètre numérique.
Liste du matériel :
— GBF
— Oscilloscope
— Wattmètre
— Ampoule 24 V
— Bobine
— Plaquette d’essais
— Transistor MOSFET « Canal n IRF 640 »
— Diode rapide « BYW80-200 »
— Transistors PNP (2)
— Transistors NPN (2)
— Diodes (4)
— Composants à disposition
— Alimentation stabilisée
— Module Arduino avec logiciel installé
1 Réalisation d’un variateur pour l’éclairage d’une ampoule
Utilisation d’un potentiomètre :
Déterminer et mettre en œuvre un protocole expérimental permettant de réaliser un variateur pour l’éclairage
d’une ampoule à l’aide d’un potentiomètre.
On mesurera la puissance délivrée par le générateur pour réaliser le début de l’allumage de l’ampoule.
Utilisation d’un hacheur :
Déterminer et mettre en œuvre un protocole expérimental permettant de réaliser un variateur pour l’éclairage
d’une ampoule à l’aide d’un montage « hacheur série ».
On mesurera la puissance délivrée par les générateurs pour réaliser le début de l’allumage de l’ampoule.
Caractéristiques du hacheur réalisé :
Déterminer et mettre en œuvre un protocole expérimental permettant de visualiser, à l’oscilloscope a, les chro-
nogrammes du hacheur série réalisé, alimentant une charge résistive.
On mesurera notamment l’ondulation de courant dans la charge résistive, et on mettra en évidence l’influence
des paramètres du montage sur l’amplitude de l’ondulation.
a. Attention au problème de masse commune
2 Réalisation d’un onduleur
Déterminer et mettre en œuvre un protocole expérimental permettant de réaliser un onduleur à l’aide d’un
hacheur 4 quadrants.
–1– P.E LEROY

Lycée Brizeux
PSI Travaux pratiques de Physique-Chimie
Annexe 1 - Réalisation d’un hacheur série
1 Présentation du hacheur utilisé
1.1 Principe
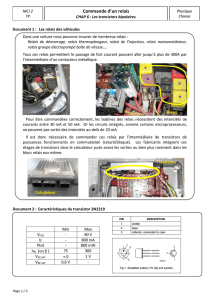
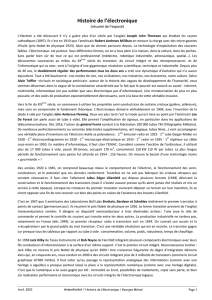
Le hacheur série « dévolteur » utilisé a pour schéma de principe :
(a) (b)
Les interrupteurs de puissance K et K’ sont un transistor de commande T et une diode de roue libre D.
Le transistor et la diode doivent supporter un grand courant (environ 10 A), et pour la diode une tension
inverse élevée (environ 100 V). Par ailleurs, ils doivent être assez rapides (surtout la diode, car les diodes les
plus courantes ne commutent pas correctement à haute fréquence).
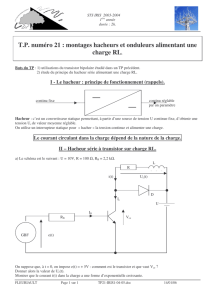
On utilise ainsi un transistor de type MOSFET canal n IRF640 et une diode rapide de puissance BYW80-uT
200 :
C’est la tension ucom entre la grille G et la source S qui commande le transistor. Lorsque cette tension est nulle,
le courant ientre le drain D et la source S est nul (interrupteur K ouvert), et lorsque la tension a une valeur
positive suffisante (10 V ici), le courant icircule librement et uTest presque nul (interrupteur K fermé).
1.2 Commande du transistor
La tension de commande sera délivrée par le GBF, avec les caractéristiques suivantes (qui constituent un exemple
d’utilistation) :
— Pas de valeur négative !
— Valeur de ucom pour commander le transistor fermé : 10 V
— Fréquence f= 8,0kHz et rapport cyclique α= 65%
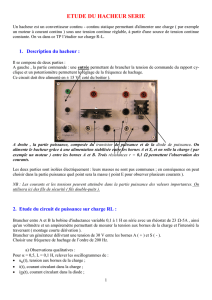
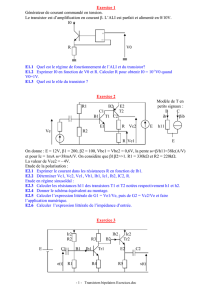
1.3 Montage
La self de lissage (on peut utiliser toutes les spires ou la moitié
selon les cas) est une bobine de 250 spires d’autoinductance L
dont le fil a une résistance r. Une résistance supplémentaire de
1 Ω est branchée en série avec l’alimentation Epour pouvoir
visualiser facilement le courant iqu’elle délivre. La résistance
de charge est une résistance de puissance Rc'20 Ω.
–2– P.E LEROY

Lycée Brizeux
PSI Travaux pratiques de Physique-Chimie
Annexe 2 - Réalisation d’un onduleur à l’aide
d’un hacheur 4 quadrants
L’objectif est de réaliser un convertisseur DC/AC. Plus précisément, on souhaite convertir un signal continu
de forte amplitude en signal quasi-sinusoïdal de forte amplitude. Pour cela, on utilise un signal de commande
lui-même sinusoïdal.
1 Montage
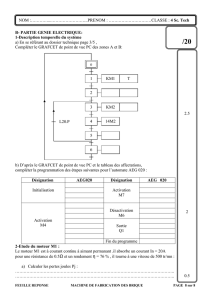
Le montage de base est appelé hacheur « à 4 quadrants » :
Les transistors T1 et T3 d’une part, T2 et T4 d’autre part sont ouverts ou fermés en même temps (ils sont
synchronisés). Ces deux groupes de transistors sont alternativement ouverts et fermés, avec le rapport cyclique
α.
2 Principe de la commande MLI (Modulation de Largeur d’Impul-
sion)
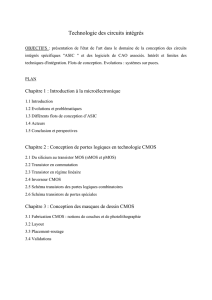
Le principe est de faire varier la valeur du rapport cyclique de façon sinusoïdale (on « module » la « largeur
d’impulsion »). La tension aux bornes de la charge a alors l’allure suivante (fréquence de modulation de 300 Hz
et fréquence de hachage de 2000 Hz) :
Le spectre montre que le mode fondamental du signal de sortie a une fréquence correspondant à la fréquence du
signal de commande (300 Hz ici). Il suffit donc de filtrer ce signal de sortie pour ne garder que cette composante
pour générer un signal quasi-sinusoïdal. Le filtre choisi sera donc de type passe-bas, de préférence avec
des composant ne consommant pas d’énergie en moyenne (bobine, condensateur).
–3– P.E LEROY

Lycée Brizeux
PSI Travaux pratiques de Physique-Chimie
3 Mise en œuvre à l’aide d’un module Arduino
Le pilotage des 4 transistors peut s’effectuer à l’aide de signaux logiques issus d’un module Arduino. Pour
une mise en œuvre simplifiée, on peut par exemple utiliser des transistors bipolaires 1, de type NPN pour les
interrupteurs du haut (1 et 2) et des transistors de type PNP pour les deux interrupteurs du bas (3 et 4). On
considèrera que leurs comportements sont simplement inversés face à un même signal de commande.
La commande des différents interrupteurs à l’aide d’un module Arduino s’effectue à l’aide de deux sorties
analogiques. Pour exemple, le programme suivant génère un signal de commande sur les sorties 3 et 5, générant
un signal de hachage de période Th= 100 ms, modulé par un signal de commande sinusoïdal de période T= 5 s.
1const int com _m1 =3;
const int com _m2 =5;
3double alpha =0.5;
const int Th =100; // Th en ms
5int n =0 ;
const int T=5000;
7
// the setup routi ne runs once w hen you press reset
9void setup ()
{
11 // in iti aliz e the digi tal pin as an outpu t
pi nM ode ( com_m1 , OUTP UT ) ;
13 pi nM ode ( com_m2 , OUTP UT ) ;
}
15
// the loop r out ine run s over and over again fo rev er
17 void loo p ()
{
19 n =n +1 ;
al pha =0 .5 *( 1+ co s ( 2* 3. 14 / T *( n * Th ) ) ) ;
21 di gi talW ri te ( com _m1 , HIG H );
di gi ta lW ri te ( co m_m 2 , LO W );
23 de lay ( a lph a * Th ) ;
di gi ta lW ri te ( co m_m 1 , L OW ) ;
25 di gi talW ri te ( com _m2 , HIG H );
de lay ((1 - al ph a ) * Th ) ;
27 }
onduleur.ino
1. Un des problèmes souvent rencontrés lors de l’utilisation de transistors bipolaires est la puissance dissipée par ceux-ci. En
effet, chaque transistor possède une chute de tension à ses bornes même lorsqu’il est saturé (tension résiduelle entre le collecteur
et l’émetteur du transistor en saturation). Cette chute de tension multipliée par le courant passant dans la charge correspond à
une puissance dissipée au sein du transistor limitant le courant délivré mais aussi ne permettant pas d’appliquer la pleine tension
d’alimentation à la charge.
Les transistors MOS sont mieux adaptés, leur chute de tension à leur borne est plus faible, leur commutation est plus rapide et
le courant supporté par le transistor est plus important. Leur résistance résiduelle lorsqu’ils sont saturés est assez faible et limite
donc la puissance dissipée. Comme pour les transistors bipolaires, on utilise des MOSFET à canal N pour les transistors du haut
et des Mosfets à canal P pour les transistors du bas.
–4– P.E LEROY
1
/
4
100%