Odométrie du Pobot Easy

Odométrie du Pobot Easy
Extrait du PoBot
http://www.pobot.org
Odométrie du Pobot Easy
- L'association - Nos robots - Robots du club - Robots à roues - Base "Pobot Easy" (2009) -
Date de mise en ligne : samedi 28 février 2009
Description :
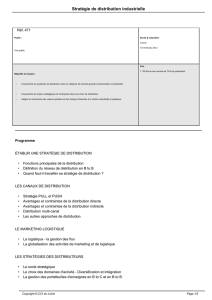
Un capteur de lumière permet de détecter une alternance noir/blanc sur une roue et d'en déduire son avancée (position, vitesse).
PoBot
Copyright © PoBot Page 1/14

Odométrie du Pobot Easy
Sommaire
• Mécanique
•Électronique
•Programmation
Voici une odométrie simple, avec une seule détection. Une meilleure odométrie nécessiterait plus de points et surtout
des encodeurs en quadrature, permettant de connaitre le sens de rotation.
Premier test d'implantation
Roues codeuses
Nicolas, de Easy Robotics [http://www.easyrobotics.fr], nous a fait parvenir une paire de capteurs et les bras
d'aluminium qui vont avec pour les fixer au chassis. On va donc commencer par trouver le meilleur emplacement.
Mécanique
Comme les capteurs vont suivre les secteurs noir et blanc d'un disque collé sur la roue, il est préférable qu'ils soient
placés à 90° des rayons, et de préférence dans un endroit isolé de la lumière.
Copyright © PoBot Page 2/14

Odométrie du Pobot Easy
Le support du capteur
premier test pour accéder facilement aux pattes
Essai de fixation dessous
Les codeurs sont conçus pour être fixés directement sur la cage des servomoteurs, grâce aux trous filetés de la
"brique Easy".
Fixation définitive (applont)
Fixation définitive (côté)
Ensuite on fixe les disques sur les roues, en imprimant, découpant et collant les deux parties sur les jantes en
aluminium.
Copyright © PoBot Page 3/14

Odométrie du Pobot Easy
Disques codeurs pour les roues
<!-- google_ad_client = "ca-pub-6809994141685910"; /* Corps central */ google_ad_slot = "0178404633";
google_ad_width = 728; google_ad_height = 90; //--» <script type="text/javascript"
src="http://pagead2.googlesyndication.com/pagead/show_ads.js">
Électronique
Ces capteurs sont des émetteurs/récepteurs. Les deux composants ont des entrées/sorties distinctes et on peut
donc les considérer comme une Led et comme un phototransistor NPN dans un boitier commun.
La documentation du capteur Honeywell HOA709 :
Datasheet HOA709
Modèle HOA709-1 "Mexico"
Il y a 2 versions, avec phototransistor ou avec photodarlington. La différence entre les deux se fait sur les temps de
réponse :
HOA0708 : Saturation=0.4V
HOA0709 : Saturation=1.1V
Le parametre Rise & Fall Time nous indique que le photo-darlington est 5 fois plus lent que le photo-transistor :
HOA0708 : Rise & Fall Time=15us
HOA0709 : Rise & Fall Time=75us
On peut donc calculer une fréquence théorique maximum de fonctionenment de 1/(75+75)=6,66 kHz avec une
résistance de sortie de 100R. (Plus cette résistance sera grande et plus la vitesse max sera petite).
Led infra-rouge
Les caractéristiques de la DEL infrarouge qui nous intéressent sont :
la tension directe (forward voltage, Vf) : 1,6 volts
le courant d'utilisation (If) : 30 mA
Comme on utilise une tension Vcc de 5 volts, il faut prévoir une résistance de 120 ohms car :
R = U / I = (Vcc - Vf) / If = (5 - 1.6) / 0.03 = 113 Ohms (pouvant être arrondi à 110 mais dans la gamme
disponible, E12, c'est 120 qui est le plus proche)
Copyright © PoBot Page 4/14

Odométrie du Pobot Easy
Résistance de 120 ohms
Une prise de vue à l'appareil photo permet de voir que la led est bien allumée :
Emetteur allumé
Photodarlington
Comment fonctionne un phototransistor ? la base est sensible à la lumière : quand il y a de la lumière, le transistor
est passant. On a donc une valeur plus ou moins importante sur l'émetteur. Un retour d'expérience intéressant nous
est transmis par Patrick :
Différence entre darlington et transistor : Le darlington va avoir un gain plus important qu'un transistor simple.
Le photodarlington va commuter en saturé avec moins de lumière. Du coup le transistor de sortie devrait
fonctionner plus tôt en bloqué/saturé. En gros c'est ce que tu recherches.
En 2002 j'avais fais un codeur avec ce capteur, avec plus ou moins la même configuration et un ampli OP
monté en seuilleur pour avoir des transitions 0/1 franches. Il y avait plein de phénomènes de rebonds qui
faisaient qu'au lieu d'avoir un front il y avait des séries d'oscillations très rapides à la place du front.
C'était invisible à l'oscillo réglé sur une fréquence propre à voir les crénaux car les rébonds très rapides se
confondaient avec le front. Il a fallu passer à quelques ns pour voir le phénomène.
Ces rebonds étaient bien comptés par le micro-contrôleur ce qui donnait un comportement ératique
au robot.
Bref mauvais souvenir avec ces trucs. Je dirai qu'il faut prévoir un bon filtrage avec un passe-bas efficace
pour se prémunir de nuits blanches.
Donc on est prévenu. On va donc commencer par regarder ce qui se passe sur l'émetteur du darlington (rappel :
base, collecteur, émetteur).
Copyright © PoBot Page 5/14
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}