Figure II.10 : Un poisson polymère.

0
Table des matières
Introduction : .......................................................................................................................................................... 1
Chapitre 1 : BIBLIOGRAPHIE SUR LES POLYMÈRES. ................................................................................. 2
1.1. Phénomènes fondamentaux dans les polymères : ................................................................................. 2
1.1.1 Introduction : ................................................................................................................................ 2
1.1.2 Phénomène piézoélectrique : ........................................................................................................ 2
1.1.3 Phénomène ferroélectrique : ......................................................................................................... 3
1.1.4 Électrostriction : ........................................................................................................................... 5
1.1.5 Phénomène magnétostriction : ..................................................................................................... 6
1.2 Matériaux polymères : ........................................................................................................................... 7
1.2.1 PVDF et ses Copolymères ( PVDF-TrFE) : ................................................................................. 7
1.2.2 Silicone : ....................................................................................................................................... 8
1.2.3 Autres types de polymères: .............................................................................................................. 9
1.3 Conclusion : ........................................................................................................................................ 10
Chapitre 2 : ETAT DE L’ART DES ACTIONNEURS REALISES .................................................................... 11
2.1. Actionneurs plans : .............................................................................................................................. 11
2.2. Actionneurs enroulés : ......................................................................................................................... 13
2.3. Actionneurs de taille réduite : ............................................................................................................. 17
1.4 Conclusion : ........................................................................................................................................ 18
Chapitre 3 : MATERIAU ET PROTOCOLES EXPERIMENTAUX .................................................................. 19
3.1. Introduction : ....................................................................................................................................... 19
3.2. Matériau de l’étude : ........................................................................................................................... 19
3.2.1. Polymère : .................................................................................................................................. 19
3.2.2. Procédure de réalisation des actionneurs : .................................................................................. 19
3.2.3. Description du laser de modification des électrodes : ................................................................ 20
3.2.4. Scancoat Six-machine de pulvérisation d’électrodes métallisées : ............................................. 21
3.2.5. Dispositifs expérimental de mesure en flexion: .......................................................................... 22
3.3. Expérimental : ..................................................................................................................................... 23
3.3.1. Manipulation statique : .............................................................................................................. 23
3.3.2. Manipulation en fréquence : ....................................................................................................... 23
3.4. Conclusion : ........................................................................................................................................ 24
Chapitre 4 : RESULTATS EXPERIMANTAUX. ................................................................................................ 25
4.1. Introduction : ....................................................................................................................................... 25
4.2. Expérimentations en statique: ............................................................................................................. 25
4.3. Manipulation en fréquence : ................................................................................................................ 27
4.3.1. Formes de tension et du courant : ............................................................................................... 27
4.3.2. Etude du débattement : ............................................................................................................... 29
Chapitre 5 : CONLUSION ET PERSPECTIVES. ............................................................................................... 32
ANNEXE :............................................................................................................................................................ 33
REFRECENCE ..................................................................................................................................................... 34

1
Introduction :
Depuis plusieurs années, les matériaux n’ont cessé de développer leurs performances
et leurs techniques de mise et œuvre ont permis d’augmenter leurs applications potentielles.
Les matériaux polymères ont montré leur faculté de conversion d’énergie appliquée quelle
soit électrique ou magnétique en travail mécanique utile, ce qui ouvre une voie potentielle de
développement de nouvelles formes d’actionneurs à base de matériaux polymères dits «
électroactifs ». Dans les machines et actionneurs électriques classiques, on utilise seulement
des matériaux polymères comme isolants électriques. Mais aujourd’hui, on s’intéresse à leurs
phénomènes fondamentaux principaux pour construire des actionneurs qui ont une structure
« tout polymère ».
L’objet de notre étude est de comparer sur une forme d’actionneur piézoélectrique
bilame l’influence de la forme des électrodes d’application du potentiel électrique sur la
déformation engendrée.
Nous présentons tout d’abord, les matériaux polymères susceptibles de développer
des propriétés de conversion électromécanique de l’énergie ainsi que les phénomènes
responsables de cette conversion. Ensuite, nous détaillons par un état de l’art les différentes
réalisations pratiques effectuées. Nous exposons les méthodologies expérimentales ainsi que
les dispositifs utilisées au cours de l’étude. Enfin, nous présentons les résultats expérimentaux
obtenus.
La conclusion montre les apports et les difficultés expérimentales rencontrées et
donne quelques perspectives à ce travail.

2
Chapitre 1 : BIBLIOGRAPHIE SUR LES POLYMÈRES.
1.1. Phénomènes fondamentaux dans les polymères :
1.1.1 Introduction :
Nous nous sommes intéressés aux paramètres principaux responsables du phénomène
de transformation électromécanique : la conduction électrique, la polarisation électrique et la
déformation de polymère. La conduction électrique est l’aptitude d’un matériau à laisser les
charges électriques se déplacer donc on peut utiliser un matériau polymère conducteur
comme des conducteurs dans des machines électriques de structure polymère. La
polarisation désigne la densité de dipôles électriques, et alors, ce critère nous permet de
différencier des polymères « électroactifs », qui présentent un moment polaire global non nul,
des polymères « électroactivés » qui ne possèdent pas de moment dipolaire global (apolaires)
et qui utilisent donc un couplage électromécanique indirect pour transformer l’énergie grâce à
leurs propriétés mécaniques. Enfin, la déformation de polymère sous une excitation
extérieure est un phénomène original pour concevoir et développer de nouveaux actionneurs
polymères.
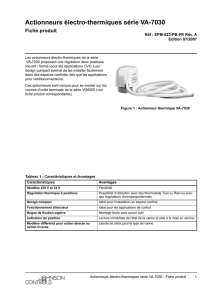
1.1.2 Phénomène piézoélectrique :
Au milieu du XIXe siècle, en 1880, les frères Curie ont fait la première démonstration
de l’effet piézoélectrique. Ils ont attesté que certains matériaux avaient la propriété de générer
des charges électriques superficielles sous l’action d’une pression ou d’une contrainte, c’est
l’effet direct. Sous l’action d’un champ électrique appliqué, les matériaux piézo-électriques
ont la propriété de se déformer, c’est l’effet inverse. Les deux effets sont indissociables.
Figure I.1: L’effet piézoélectrique direct.
L’effet direct et l’inverse peuvent s’exprimer comme suit :
Pi = dijk σjk (effet direct)
(1.1)

3
χij = dkij Ek (effet inverse)
Où : Pi est la polarisation générée le long de l’axe i sous une contrainte σjk,
dijk (=dkij ) est le coefficient piézoélectrique,
χij = est la déformation générée suivant une orientation donnée du cristal après
l’application d’un champ électrique Ek le long de l’axe k.
Tous les matériaux piézoélectriques sont anisotropes, c'est-à-dire leur maille
cristalline ne possède pas de contre de symétrie. Il y a seulement 20 classes cristallines, parmi
les 32 classes existantes, présentant l’effet piézoélectrique. Et il y a seulement 10 des 20
classes qui présentent une polarisation spontanée en l’absence de champ extérieur. Ces
classes sont dites polaires et sont pyroélectriques en raison de l’effet de la température sur
leur polarisation spontanée [1].
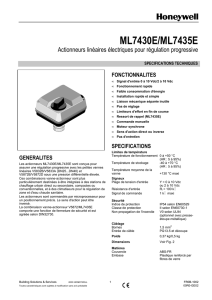
1.1.3 Phénomène ferroélectrique :
Parmi les cristaux piézoélectriques certains présentent aussi des propriétés de
ferroélectricité formant un sous groupe de la pyroélectricité. On appelle ferroélectricité la
propriété selon laquelle un matériau pyroélectricité, l’application d’un champ électrique E
provoque l’apparition d’une polarisation P dont est un cycle d’hystérésis permettant de
définir une polarisation rémanente. En fait, les diplômes électriques sont tous orientés dans la
même direction à intérieur des domaines ferroélectriques. Ces domaines sont séparés entre
eux par des parois appelés murs de domaines. En absence d’un champ extérieur, la direction
de polarisation de chaque domaine est orientée au hasard, ce qui rend le matériau
globalement non polaire. Néanmoins, lorsqu’un champ électrique est appliqué, un processus
de réorientation des directions de polarisation se déclenche. Ainsi on observe une
augmentation du nombre de domaines qui ont une direction de polarisation contraire à celle
du champ extérieur.
Figure I.2 : Représentation en 2D du processus de la polarisation dans une céramique.
En fait, sous l’influence d’un champ électrique externe, ces matériaux se polarisation
existante pour un champ électrique externe nécessaire pour la réorientation des dipôles du
cristal.

4
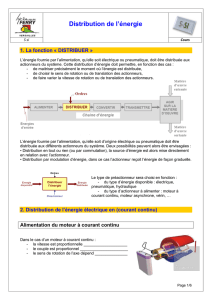
Figure I.3 : Cycle d’hystérésis d’un matériau ferroélectrique.
Si nous prenons l’exemple du titanate de baryum, en température décroissante (et à
champ électrique et contrainte nuls) ce matériau passe successivement par les phases cubique,
quadratique orthorhombique et enfin rhomboédrique. Sur ces 4 phases, seules les trois
dernières sont ferroélectriques (la phase cubique est centre-symétrique). Elles sont crées par
distorsion de la maille cubique existant à haute température et induisent un écartement des
barycentres des charges positives et négatives.
Figure I.4 : Directions de la polarisation spontanée pour différentes mailles cristallines.
Ainsi la vectrice polarisation spontanée sera orientée successivement suivant l’axe
cristallographique <001>, <101>, et<111> respectivement.
Pratiquement, l’orientation des polarisations élémentaires sur la direction du champ
polarisant s’accompagne de contraintes mécaniques dont la libération lente provoque un
retour progressif à l’état désordonné : c’est ce qu’on appelle le vieillissement des matériaux,
qui est une fonction logarithmique du temps. De plus, une élévation de la température tend à
détruire l’alignement des dipôles. A une température dite température de Curie Tc, le
matériau passe en phase cubique où il n’existe plus de moment électrique macroscopique et le
matériau perd toutes ses propriétés piézoélectriques. L’un des critères de choix de matériaux
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%