AVM 234S - Autorem

51.377/1
Sauter Components
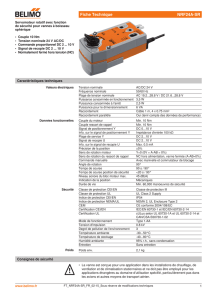
AVM 234S: Servomoteur de vanne avec positionneur SUT
Votre avantage pour plus d’efficacité énergétique
Adaptation automatique à la vanne, commande précise, haute efficacité énergétique et niveaux
sonores les plus faibles.
Domaines d'application
Pour la commande de vannes de passage ou de vannes à trois voies des séries V/BUD et V/BUE
DN65…150 ainsi que des séries V/BUG, V/BUS, VUP et V/B6R DN15...150. Pour les régulateurs à
sorties progressives (0...10 V ou 4...20 mA) ou à contacts (régulation à 2 points ou à 3 points).
Caractéristiques
Poussée minimale de 2500 N
Moteur pas à pas avec électronique de commande SUT (Sauter Universal Technologie) et
coupure électronique par détection de force
Détection automatique du signal de commande du servomoteur (continu ou à contacts),
affichage par 2 DEL
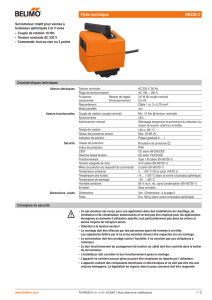
La courbe caractéristique (linéaire/quadratique/exponentielle) peut être choisie sur le
servomoteur.
Adaptation automatique à la course de la vanne, entre 8 et 49 mm, imperdable même en cas
de coupure de la tension
Sélection du sens d’action par le bornier à vis du raccordement électrique ou à distance
Interrupteur de codage pour la sélection de la courbe caractéristique et de la durée de la
course (35 s, 60 s, 120 s)
Manivelle pour le réglage manuel externe, avec coupure du moteur et comme déclencheur
pour la réinitialisation
Assemblage simple avec vanne, la liaison du servomoteur avec la tige de la vanne s’effectue
automatiquement dès que la tension de commande est appliquée.
Un grand nombre d’adaptateurs permet le montage sur des vannes de marque étrangère
Description technique
Tension d’alimentation 230 V avec des modules ou un raccordement direct pour 24 V~ ou
24 V=, commande progressive admise également pour 230 V
Boîtier en deux parties en matière plastique auto-extinguible de couleur jaune et garnitures
d’étanchéité, classe de protection IP 66
Engrenage sans entretien en acier fritté, plaque d’engrenage en acier
Accouplement servomoteur-vanne breveté
Colonne de montage en acier inox et étrier de montage en alliage léger pour le montage de
la vanne
Raccordements électriques (max. 2,5 mm²) avec un bornier à vis
Trois passages de câble défonçables pour M20×1,5 (2×) et M16×1,5
Position de montage: de vertical à horizontal
Y07552
M
100 %
0 V Signal de réglage y 10 V
B07650
0 %
Sens
d'action 2
Sens
d'action 1
7151377002 07
Type
Durée course
s/mm
Course
mm
Poussée
N
Tension 1)
Poids
kg
Servomoteur pour les vannes: VUD / BUD, VUE / BUE, VUG / BUG, VUS / BUS ainsi que VUP
AVM 234S F132
2 / 4 / 6
14…40
2500
24 V~/=
4,1
adapté avec montage pour les séries de vannes: V / B6 et VXD, VXE, BXD, BXE
AVM 234S F132-5
2 / 4 / 6
14
2500
24 V~/=
4,1
AVM 234S F132-6
2 / 4 / 6
40
2500
24 V~/=
4,6
Positionneur: 1)
Signal de commande 1
0…10 V, Ri > 100 k
Valeur initiale U0
0 ou 10 V
Signal de commande 2
4…20 mA, Ri = 50
Étendue de réglage U
10 V
Rétrosignal de position
0…10 V, charge > 2,5 k
Plage de commutation Xsh
300 mV
Tension d'alim. 24 V~
20%, 50…60 Hz
Degré de protection
IP 66 (EN 60529)
24 V=
15%
Classe de protection
III (IEC 60730)
avec accessoire 230 V~
15%
Puissance absorbée
10 W
18 VA 2)
Temps de réponse pour 3 points
200 ms
Course
8…49 mm
Température max. du fluide
130 °C 3)
Schéma de raccordement
A10357
Temp. ambiante admissible
–10…55 °C
Croquis d'encombrement
M10356
Humidité ambiante adm.
< 95% HR
Instructions de montage
MV 505919
sans condensation
Déclaration des matériaux
MD 51.377
1)
Également pour 2 points ou 3 points selon le raccordement pour 24 V~
2)
Dimensionner les transformateurs pour cette valeur sinon des dysfonctionnements peuvent apparaître.
3)
Pour des températures de fluide plus élevées 180 °C ou 240 °C, une pièce intermédiaire est nécessaire (voir accessoires)

51.377/2 AVM 234S
Sauter Components
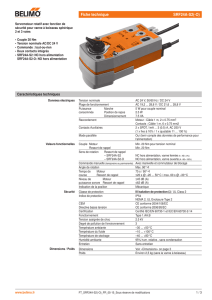
Fonctionnement
Selon le type de raccordement (voir le schéma de raccordement), le servomoteur peut être utilisé
comme servomoteur progressif (0...10 V et/ou 4...20 mA), 2 points (OUVERT/FERME) ou 3 points
(OUVERT/ARRET/FERME).
Le temps de parcours du servomoteur peut être réglé à l'aide des interrupteurs S1 et S2 selon les
besoins correspondants. Les interrupteurs S3 et S4 permettent de configurer la caractéristique
(exponentielle, linéaire ou quadratique).
La manivelle externe permet le réglage manuel de la position. En déployant la manivelle, le moteur
est coupé. Après remise en place de la manivelle, la position de consigne est à nouveau rejointe
(sans initialisation). Si la manivelle est déployée, le servomoteur reste à cette position.
Initialisation et signal retour
Le servomoteur s'initialise de lui-même si celui-ci est utilisé en tant que servomoteur progressif.
Dès qu'une tension est appliquée au servomoteur pour la première fois, le servomoteur rejoint la
butée inférieure de la vanne et permet ainsi la liaison automatique avec la tige de la vanne. En-
suite la butée supérieure est rejointe et la valeur est saisie et mémorisée via un système de me-
sure de parcours. Le signal de commande et la rétrosignalisation sont adaptés à cette course
effective. En cas de coupure de tension ou du retrait de la tension d'alimentation, aucune réinitiali-
sation n'est effectuée. Les valeurs sont conservées.
Pour la réinitialisation, le servomoteur doit être sous tension. Une initialisation est déclenchée en
déployant et en remettant en place la manivelle deux fois de suite en l'espace de 4 s. Les deux
LED clignotent alors en rouge.
Pendant l'initialisation, le signal retour est inactif ou correspond à la valeur "0". L'initialisation s'ef-
fectue avec le temps de parcours le plus court. La réinitialisation n'est valable que lorsque la pro-
cédure entière est terminée. Un déploiement supplémentaire de la manivelle interrompt la procé-
dure.
Lorsque le servomoteur détecte un blocage, il le signale en mettant le signal retour à 0 V après
environ 90 s. Pendant ce temps, le servomoteur essaiera toutefois de vaincre le blocage. Si le
blocage peut être vaincu, la fonction de régulation normale est à nouveau activée et le signal re-
tour est à nouveau disponible.
Dans le cas d'une commande 2 points ou 3 points, aucune initialisation n'est effectuée. Le signal
retour est inactif.
Accessoires
0313529 001*
Unité de domaine partiel pour l'ajustage de séquences, MV 505671; A09421
Module enfichable pour commande 2/3 points et commande continue, puissance supplémentaire 2
VA
0372332 001*
Tension d'alimentation 230 V 15%, MV 505901
0372332 002*
Tension d'alimentation 100 V 15%, MV 505901
Contacts auxiliaires (2 pcs.) 12...250 V
0372333 001*
Inversion réglables en continu, min. 100 mA et 12 V, charge adm. 6(2) A, MV 505866
0372333 002*
Contacts dorés, à partir de 1 mA, max. 30 V, version pour 3(1) A, MV 505866
0372334 001*
Potentiomètre 2000 , 1 W, 24 V; montage selon MV 505894
0372334 002*
Potentiomètre 130 , 1 W, 24 V; montage selon MV 505894
0372334 006*
Potentiomètre 1000 , 1 W, 24 V; montage selon MV 505894
0372336 180*
Pièce intermédiaire 1) (nécessaire pour fluide > 130 °C et < 180 °C, MV 505902)
0372336 240*
Pièce intermédiaire 1) (nécessaire pour fluide > 180 °C et < 240 °C, MV 505902)
Kit de montage pour AVM 234S F132 sur vannes Sauter (0372338 002: pièce intermédiaire pas nécessaire)
0372338 001
V/B6 jusqu'à DN 50 et V/BXD, V/BXE jusqu'à DN 50, course de 14 mm, MV 505903
0372338 002
V/B6 du DN 65…150 et V/BXD, V/BXE à partir de DN 65, course de 40 mm, MV 505903
0372338 003
Kit de transformation de type F132-5 sur standard servomoteur type F132, MV 505903
0372338 004
Kit de transformation de type F132-6 sur standard servomoteur type F132, MV 505903
Kit adaptateur pour vannes non Sauter
0372376 010
Siemens avec course 20 mm ou tige ø10 mm, MV 505974
0372376 014
Siemens avec course 40 mm ou tige ø14 mm, MV 505974
0372377 001
JCI DN15…150 avec course 14, 25 ou 40 mm ou tige ø10, 12 ou 14 mm, MV 505975
0372378 001
Honeywell avec 20 mm course, MV 506069
0372378 002
Honeywell avec 38 mm course, MV 506069
0372386 001
LDM Typ RY113 R/M, MV P100000538
0372387 001
Kit de montage SAUTER-Satchwell VZF1727
0372389 001
ITT-Dräger, DN 15…32, MV P100000376
0372389 002
ITT-Dräger, DN 40…50, MV P100000376
0378263 001
Butée de fin de course (nécessaire pour V/BXD, V/BXE DN15…50, V/B6 DN15 avec
kvs ≤ 1 m3/h)
0386263 001
Presse-étoupe M16×1,5
0386263 002
Presse-étoupe M20×1,5
*)
Croquis d'encombrement ou schéma de raccordement disponible sous le même numéro
1)
Pièce intermédiaire non nécessaire pour la version F132-6
7151377002 07

AVM 234S 51.377/3
Sauter Components
Raccordement comme servomoteur de vanne 2 points (24 V)
Cette commande (OUVERT/FERME) peut s'effectuer via deux câbles. La tension est appliquée sur
les bornes 1 et 2a. En appliquant la tension (24 V) sur la borne 2b, la voie de réglage de la vanne
est ouverte. Après coupure de cette tension, le servomoteur se met dans la position finale oppo-
sée et ferme la vanne. Dans les positions finales (butée de vanne ou course maximale atteinte) ou
en cas de surcharge, la fonction électronique de coupure du moteur est activée (pas de fin de
course).
L'interrupteur de codage permet de régler les temps de parcours. La caractéristique ne peut pas
être sélectionnée ici (la caractéristique de la vanne s'applique ici). Les bornes 3i, 3u et 44 ne doi-
vent pas être raccordées.
Raccordement comme servomoteur de vanne 3 points (24 V)
En appliquant une tension sur la borne 2a (ou 2b), la vanne peut être amenée dans toute position
au choix. Si une tension est appliquée sur les bornes 1 et 2b, la tige d'accouplement sort et ouvre
la vanne. Elle rentre et ferme la vanne lorsque le circuit est fermé sur les bornes 1 et 2a.Dans les
positions finales (butée de vanne ou course maximale atteinte) ou en cas de surcharge, la fonction
électronique de coupure du moteur est activée (pas de fin de course). En permutant les raccorde-
ments, le sens de la course peut être modifié. L'interrupteur de codage permet de régler les temps
de parcours. La caractéristique ne peut pas être sélectionnée ici (la caractéristique de la vanne
s'applique ici). Les bornes 3i, 3u et 44 ne doivent pas être raccordées.
Raccordement comme servomoteur de vanne 2/3 points ou commande continue avec 230 V
(accessoire 0372332)
Le module accessoire est enfiché à l'emplacement correspondant puis est raccordé selon le type
de commande. L'interrupteur de codage sur la carte principale permet de sélectionner les temps
de parcours. La caractéristique peut uniquement être sélectionnée avec une commande continue.
La caractéristique de la vanne s'applique ici.
Sur ce servomoteur (sans ressort de rappel), le levier de commutation se situe dans la position
inférieure.
Raccordement à une tension de commande (0...10 V et/ou 4...20 mA)
Le positionneur intégré commande le servomoteur en fonction du signal de réglage y du position-
neur.Un signal de tension (0...10 V–) sur la borne 3u ou un signal de courant sur la borne 3i sert
de signal de commande. Si un signal de commande est appliqué simultanément sur les deux
bornes (3u (0...10 V) et 3i (4...20 mA)), l'entrée avec la valeur la plus élevée est prioritaire.
Sens d'action 1 (tension secteur sur raccordement interne 2a):
Lorsque le signal de réglage augmente, la tige d'accouplement sort et ouvre la vanne (voie de
réglage).
Sens d'action 2 (tension secteur sur raccordement interne 2b):
Lorsque le signal de réglage augmente, la tige d'accouplement rentre et ferme la vanne (voie de
réglage).
Le point initial ainsi que l'étendue de réglage sont fixes. Pour le réglage de domaines partiels (et
uniquement pour l'entrée de tension 3u), une unité d'étendue partielle est disponible en accessoire
(voir le fonctionnement de l'unité de domaine partiel) prévue pour le montage dans la vanne.
Après application de la tension d'alimentation et après initialisation, le servomoteur rejoint toute
course de vanne comprise entre 0% et 100% selon le signal de commande. Grâce à l'électronique
et au système de mesure de parcours, aucune course n'est perdue, et le servomoteur ne néces-
site aucune initialisation ultérieure périodique. Lorsque les positions finales sont atteintes, cette
position est contrôlée, le cas échéant corrigée et à nouveau mémorisée. Le fonctionnement paral-
lèle de plusieurs servomoteurs du même type SUT est ainsi garanti. Le signal retour y0 = 0...10 V
correspond à la course effective de la vanne de 0 à 100%.
Si dans le sens d'action 1, le signal de commande 0...10 V est interrompu, la tige rentre entière-
ment et la vanne se ferme. Pour pouvoir ouvrir la vanne (sens d'action 1), il faut appliquer une
tension de 10 V entre les bornes 1 et 3u ou commuter sur le sens d'action 2.L'interrupteur de co-
dage permet de régler la courbe caractéristique de la vanne. Une courbe caractéristique exponen-
tielle et quadratique ne peut être générée que si le servomoteur est utilisé comme servomoteur
progressif. Avec d'autres interrupteurs peuvent être sélectionnées les temps de parcours (appli-
cable pour 2 points, 3 points ou fonctionnement progressif).
Il est également possible de réaliser une commande continue avec 230 V ou 110 V. Il faudra ce-
pendant veiller à ce que le conducteur neutre du régulateur soit branché à la tension de com-
mande. Le conducteur neutre de la tension d’alimentation ne doit pas être utilisé pour le module.
Témoins LED
La signalisation est réalisée par 2 LED bicolores (rouge / vert).
Les deux LED clignotent en rouge: Processus d'initialisation
LED supérieure allumée en rouge: Butée supérieure ou position "fermé" atteinte
LED inférieure allumée en rouge: Butée inférieure ou position "ouvert" atteinte
LED supérieure clignote en vert: Servomoteur en cours de manoeuvre, rejoint la position "fermé"
LED supérieure allumée en vert: Servomoteur à l'arrêt, dernier sens de parcours "fermé"
LED inférieure clignote en vert: Servomoteur en cours de manoeuvre, rejoint la position "ouvert"
LED inférieure allumée en vert: Servomoteur à l'arrêt, dernier sens de parcours "ouvert"
Aucune LED allumée: Pas de tension d'alimentation (borne 2a ou 2b)
Deux LED rouge et verte clignotantes: Le servomoteur est en mode manuel
7151377002 07

51.377/4 AVM 234S
Sauter Components
Unité de domaine partiel (accessoire 0313529)
Cet accessoire peut être monté dans le servomoteur ou à l'extérieur dans un coffret de répartition
électrique. Le point initial U0 ainsi que l'étendue de réglage U peuvent être réglés à l'aide de
potentiomètres. De cette manière, le signal de commande du positionneur permet de commander
plusieurs servomoteurs en séquence ou en cascade. Le signal d'entrée (plage partielle) est trans-
formé en un signal de sortie de 0...10 V.
Remarques concernant l'étude et le montage
La pénétration de condensat, de gouttes d'eau, etc. dans le servomoteur le long de la tige de la
vanne doit être évitée.
La vanne est enfichée directement sur le servomoteur et fixée à l'aide de vis (pas d'autres réglages
nécessaires). La liaison du servomoteur avec la tige de la vanne s'effectue automatiquement.
Dans l'état de livraison, la tige du servomoteur se situe en position médiane.
Le boîtier comporte trois passages de câble défonçables qui sont automatiquement percés lors du
vissage du passe-câble.
Le concept moteur pas-à-pas/électronique garantit le fonctionnement parallèle de plusieurs ser-
vomoteurs de vanne du même type. La section du câble de raccordement doit être choisie en
fonction de la longueur de la ligne et du nombre de servomoteurs. Pour cinq servomoteurs reliés
en parallèle et une longueur de ligne de 50 m, nous recommandons d'utiliser une section de câble
de 1,5 mm2 (puissance absorbée du servomoteur × 5).
Au maximum, le servomoteur peut être équipé d'un module 230 V, d'un accessoire supplémentaire
(contact auxiliaire ou potentiomètre) ainsi que de l'unité de domaine partiel.
Montage à l'extérieur. Si les appareils doivent être installés en dehors du bâtiment, nous conseil-
lons de prévoir une protection supplémentaire contre les intempéries.
Indications techniques supplémentaires
Le boîtier jaune constitué d'une partie avant, d'une partie arrière et d'un couvercle de raccorde-
ment ne sert que de protection. Le moteur à courant continu, l'électronique de commande, les
pièces porteuses ainsi que l'engrenage sans entretien sont logés dans le boîtier. La tige du ser-
vomoteur et les colonnes sont en matériau inoxydable. Les platines internes et l'engrenage sont en
acier. Le guidage de l'axe de la vanne et l'accouplement de col de vanne sont en aluminium moulé
sous pression.
Indication concernant la température ambiante: Pour une température du médium dans la vanne
de 110 °C, la température ambiante peut être de 60 °C. Pour une température du médium supé-
rieur à 110 °C, la température ambiante ne doit pas excéder 55 °C ou il faut insérer l'accessoire
entretoise 0372336 180.
Contact inverseur auxiliaire:
0372333 001 Puissance de commutation max. 250 V~, courant min. 250 mA pour 12 V (ou 20 mA
pour 20 V)
Puissance de commutation max. 12…30 V=, courant max. 100 mA
0372333 002 Puissance de commutation max. 250 V~, courant min. 1 mA pour 5 V
Puissance de commutation max. 0,1…30 V=, courant 1…100 mA
Une seule utilisation au-dessus de 10 mA ou de 50 V élimine la couche dorée, et le
commutateur ne pourra être utilisé que pour des puissances de commutation plus
hautes.
Mises en garde
Lorsque la température du fluide dans la vanne est élevée, les colonnes d'entraînement
et la tige peuvent prendre des températures tout aussi élevées.
Si des dommages peuvent apparaître suite à la panne de l'organe de régulation, il faut
prévoir des mesures de protection supplémentaires.
Conformité CE
Directive CEM 2004/108/CE Directive Machines 98/37/CEE/I/B Directive Basse tension 2006/95/CE
EN 61000-6-1 EN 1050 EN 60730-1
EN 61000-6-2 EN 60730-2-14
EN 61000-6-3 Catégorie surtension III
EN 61000-6-4 Degré de pollution III
7151377002 07

AVM 234S 51.377/5
Sauter Components
7151377002 07
On
Off
Signal
Signal
Course
Course
v
Signal
v
Signal
Course
Signal
v
Signal
Signal
v
Signal
Course
Course
v
Courbe
voulue Codage interrupteur Caract. vanne Caract. servomot. Effectif sur vanne
= %
x2
lin
= %
lin
Course
v
v
Course
v
v
Course
v
Signal
Course
Signal
On
Off
On
Off
On
Off
On
Off
B10376
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
exponentielle
quadratique
linéaire
exponentielle
linéaire
= Réglage d'origine
Course
Temps
par mm Codage interrupteur Temps de parcours
pour course 14 mm Temps de parcours
pour course 20 mm Temps de parcours
pour course 40 mm
2s 28s ± 1 40s ± 1 80s ± 2
4s 56s ± 2 80s ± 2 160s ± 4
6s
84s ± 4 120s ± 4 240s ± 8
B10377
On
Off
On
Off
On
Off
On
Off
1 2 3 4
1 2 3 4
1 2 3 4
= Réglage d'origine
 6
6
1
/
6
100%