les mémoires

Université de Jijel/ Fac des sciences d’ingénieur/Dép d’electronique/Module TEC 586/Les mémoires
- 1 -
PRÉSENTATION :
I- Caractéristiques d’une mémoire :
I-1-Taille :
I-2-Organisation :
I-3-Temps d’accès :
I-4-Consommation :
I-5-Alimentation :
I-6-Décodage d’adresse :
II-La mémoire morte (ROM) :
-Les types de ROM :
II-1-ROM :
II-2-PROM :
II-3-EPROM :
II-4-EEROM :
III-La mémoire vive (RAM) :
III-1-Types de mémoires vives :
III-2-Les types de la RAM :
II1-2-1-RAM STATIQUE (SRAM) :
-Caractéristiques d’une RAM statique :
III-2-2-RAM DYNAMIQUE (DRAM) :
-Caractéristiques d’une RAM dynamique :
1 -Adressage :
2-Refraichissement :
3-Mise en oevre d’une RAM dynamique de 16 kbits :
IV-Plan de mémoire 16 koctets :
V -Alimentation :
VI -Réalisation :

Université de Jijel/ Fac des sciences d’ingénieur/Dép d’electronique/Module TEC 586/Les mémoires
- 2 -
PRÉSENTATION :
Pour pouvoir fonctionner, un microprocesseur nécessite des organes ce stockage de
l’information. Déjà dans le première chapitre nous avons vu qu’un microprocesseur dispose d’un
certain nombre de registres généraux lui permettant de mémoriser les donné traitées par l’unité
arithmétique et logique. Outre ces informations, un micro-ordinateur doit pouvoir stocker les
programmes et l’ensemble des données transitant par le microprocesseur. Cette fonction est assumée
par la mémoire centrale réalisée à partir de mémoires semi-conducteurs.
Le tableau de la figure (1)résume les principales qui circulent sur le dus de données d’un
microprocesseur. Suivant leurs caractéristiques, ces informations peuvent être divisées en deux
groupes : le premier utilise ces mémoires vives ou RAM. Ces mémoires peuvent être aussi bien lues
qu’écrites, par contre elles perdent leur information en cas de rupture de l’alimentation : des RAM sont
des mémoires volatile. Le second groupe utilise des mémoires mortes ou ROM, ces mémoires sont à
lecture seule et conservent leur contenu en présence ou non de l’alimentation : les ROM sont des
mémoires non volatiles, avent d’énonces les différents types de RAM et de ROM qui existent, nous
pouvons définir les caractéristiques communes à à ces deux mémoires.
Type d’information
Caractéristiques
Mémoires utilisées
- Données : résultat d’un
calcul intermédiaire ou
d’une acquisition
- Programmes temporaires
- Programmes résidents
(moniteur, interpréteur
basic)
- Durée de vie limitée
- Liaisons bidirectionnelles
avec le microprocesseur
(lecture et écriture)
- Durée de vie illimitée
- informations lues
uniquement
RAM
(Random Access mémory)
ROM
(Random Only Mémory)
Fig. (1) : information circulant par le bus d’un microprocesseur
I- Caractéristiques d’une mémoire :
I-1-Taille : Exprimé en nombre de bits (1 Kbit = 1024 =
10
2
bits) la capacité totale d’une mémoire.
I-2-Organisation : Suivant le type de mémoire, les informations peuvent être mémorisées sous forme
de mors de 8 bites, 4 bits ou de 1 bits (dans le cas de mots de 8 bits, on pourra exprimer d’une
mémoire en Koctets).
I-3-Temps d’accès : Temps qui s’écoule entre l’application d’une adresse et l’instant ou l’information
est disponible en sortie (temps de lecture) : en général ce temps est exprimé en nanosecondes.
I-4-Consommation : Donne en mw la puissance dans une mémoire.
I-5-Alimentation : suivant le type de mémoire utilisé, l’alimentation de la technologie employée,le
tableau de la figure (2) donne les caractéristiques comparées des trois technologies : bipolaire, MOS,
CMOS.
Intégration (capacité)
Consommation
vitesse
Bipolaire
MOS
CMOS
Faible
Très grande
Grande
Grande
Moyenne
Moyenne
Moyenne
Faible
Moyenne
Fig. (2) : Comparatif de différentes technologies
I-6-Décodage d’adresse :
Quelque soit la mémoire utilisée celle-ci doit pouvoir être localisée dans l’espace adressable par le
microprocesseur. Par exemple un microprocesseur 8 bits qui peut adresser 64 Koctets de mémoire
verra celle-ci diviser en sous-ensembles, chaque sous-ensemble étant réservé à une fonction donnée. A
titre d’exemple, le tableau de la figure (3) donne le décodage mémoire d’un TRS 80 : la zone {0000-
2FFF} est occupée par l’interpréteur basic alors que la zone {0000-2FFF} est laissée libre à

Université de Jijel/ Fac des sciences d’ingénieur/Dép d’electronique/Module TEC 586/Les mémoires
- 3 -
l’utilisateur. Le premier découpage étant fait il faut souvent réaliser un second découpage dans une
même zone afin que le microprocesseur puisse venir sélectionner un boîtier mémoire parmi N.
0000-2FFF ROM BASIC
0000-37DD non réalisé
37DD-37FF adresses périphérique
3800-3BFF Clavier
3600-3FFF mémoire écran
4000-7FFF 16 K RAM dynamique
8000-FFFF zone extension RAM
Fig. 3 : découpage mémoire TRS 80niveau I.
Prenons l’exemple d’une mémoire 1 Koctet, elle dispose de 10 bits d’adresse (
10
2
= 1024 = 1Koctet)
lui permettant de balayer touts ces cellules mémoires. Supposons maintenant que l’on veille réaliser
une mémoire de 2 Koctets à partie de deux boîtiers définis précédemment. On devine tout de suite que
pour éviter tout recouvrement entre ces deux boîtiers dans l’espace de 64 Koctets, c’est le rôle du
codage d’adresse. Pour réaliser ce codage toutes les mémoires disposent d’une ou plusieurs broche de
validation (notées CS chip select ou CE chip enable) qui vont permettre de sélectionner les boîtiers
avec lesquels le microprocesseur désire échanger des informations. Dans notre exemple, les bits
d’adresse A0 et A9 seront reliés au bus d’adresse des mémoires alors que A10 à A 15 serviront au
décodage.
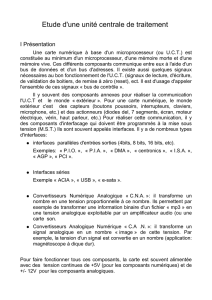
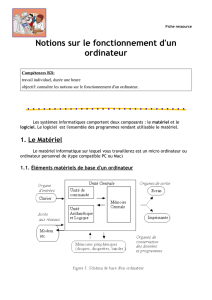
Les schémas de décodage d’adresse font appel à des circuits très classiques. La circuit de la figure (4)
utilise une porte NAND 8 entrées 74LS30 et deux inverseurs 74LS04. Ce circuit permet de pointer la
zone d’adresse EDOO à EDFF c'est-à-dire 256 octets. La figure (5) donne un outre circuit qui utilise 4
ou exclusif (74LS266) reliés à leur sortie afin de réaliser un ou câblé. Suivant la configuration des 4
interrupteurs placés en entrée du 74LS266, on pourra décoder une zone d’adresse différente. Si les 4
interrupteurs sont ouvertes la sortie du 74LS04 passera à l’état bas lorsque les 4 bits
15
A
à
12
A
seront à
un niveau « 0 », ce qui correspont à la zone d’adresses comprise entre 0000 et 0FFF (4 octets).
Ces circuits décodeurs d’adresses spécialisés existent comme le 74LS138.
Fig(5)Décodage d’adresse(74LS266)

Université de Jijel/ Fac des sciences d’ingénieur/Dép d’electronique/Module TEC 586/Les mémoires
- 4 -
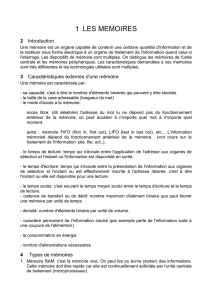
La figure (6) présente le brochage d’un 74LS138 et mode de connexion avec un microprocesseur. En
plus des broches de sélection : A, B, C reliées au bus d’adresses du microprocesseur, on trouve trois
broches de validation. Ces broches pourrant être reliées au bus d’adresses du microprocesseur pour
réaliser prédécdage ou au bus de contrôle. Par exemple, dans le cas d’un microprocesseur ZB0 une de
ces broches pourra être reliée au signal de contrôle
MREQ
qui passe à l’état bas uniquement lorsqu’il
y a accès à la mémoire.
Fig(6)Décodeur J ver 74LS38
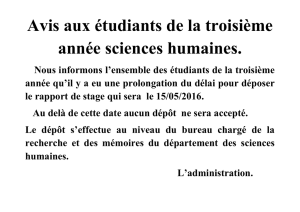
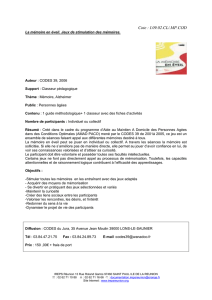
II-La mémoire morte (ROM) :
Il existe un type de mémoire permettant de stocker figur(7)des données en l'absence de courant
électrique, il s'agit de la ROM (Read Only Memory, dont la traduction littérale est mémoire en lecture
seule) appelée mémoire morte, parfois mémoire non volatile car elle ne s'efface pas lors de la mise
hors tension du système.
Ce type de mémoire permet notamment de conserver les données nécessaires au démarrage de
l'ordinateur. En effet, ces informations ne peuvent être stockées sur le disque dur étant donné que les
paramètres du disque (essentiels à son initialisation) font partie de ces données vitales à l'amorçage.
Différentes mémoires de type ROM contiennent des données indispensables au démarrage, c'est-à-dire:
Le BIOS est un programme permettant de piloter les interfaces d'entrée-sortie principales du système,
d'où le nom de BIOS ROM donné parfois à la puce de mémoire morte de la carte-mère qui l'héberge.
Le chargeur d'amorce: un programme permettant de charger le système d'exploitation en mémoire
(vive) et de le lancer. Celui-ci cherche généralement le système d'exploitation sur le lecteur de
disquette, puis sur le disque dur, ce qui permet de pouvoir lancer le système d'exploitation à partir
d'une disquette système en cas de dysfonctionnement du système installé sur le disque dur.
Le Setup CMOS, c'est l'écran disponible à l'allumage de l'ordinateur permettant de modifier les
paramètres du système (souvent appelé BIOS à tort...).
Le Power-On Self Test (POST), programme exécuté automatiquement à l'amorçage du système
permettant de faire un test du système (c'est pour cela par exemple que vous voyez le système
"compter" la RAM au démarrage).
Etant donné que les ROM sont beaucoup plus lentes que les mémoires de types RAM (une ROM a un
temps d'accès de l'ordre de 150 ns tandis qu'une mémoire de type SDRAM a un temps d'accès
d'environ 10 ns), les instructions contenues dans la ROM sont parfois copiées en RAM au démarrage,
on parle alors de shadowing (en français cela pourrait se traduire par ombrage, mais on parle
généralement de mémoire fantôme).

Université de Jijel/ Fac des sciences d’ingénieur/Dép d’electronique/Module TEC 586/Les mémoires
- 5 -
Fig(7)mémiore morte 2K* 8bits
-Les types de ROM :
Les ROM ont petit à petit évolué de mémoires mortes figées à des mémoires programmables, puis
reprogrammables.
1-ROM : Les premières ROM étaient fabriquées à l'aide d'un procédé inscrivant directement les
données binaires dans une plaque de silicium grâce à un masque. Ce procédé est maintenant obsolète
2-PROM : Les PROM (Programmable Read Only Memory) ont été mises au point à la fin des années
70 par la firme Texas Instruments. Ces mémoires sont des puces constituées de milliers de fusibles (ou
bien de diodes) pouvant être "grillés" grâce à un appareil appelé « programmateur de ROM »,
appliquant une forte tension (12V) aux cases mémoire devant être marquées. Les fusibles ainsi grillés
correspondent à des 0, les autres à des 1
3-EPROM : Les EPROM (Erasable Programmable Read Only Memory) sont des PROM pouvant être
effacées. Ces puces possèdent une vitre permettant de laisser passer des rayons ultra-violets. Lorsque
la puce est en présence de rayons ultra-violets d'une certaine longueur d'onde, les fusibles sont
reconstitués, c'est-à-dire que tous les bits de la mémoire sont à nouveau à 1. C'est pour cette raison que
l'on qualifie ce type de PROM d'effaçable
4-EEPROM : Les EEPROM (Electrically Erasable Read Only Memory) sont aussi des PROM
effaçables, mais contrairement aux EPROM, celles-ci peuvent être effacées par un simple courant
électrique, c'est-à-dire qu'elles peuvent être effacées même lorsqu'elles sont en position dans
l'ordinateur.
Il existe une variante de ces mémoires appelée mémoires flash (également ROM Flash ou Flash
EPROM). Contrairement aux EEPROM classiques, utilisant 2 à 3 transistors par bit à mémoriser, la
Flash EPROM utilise un seul transistor. D'autre part l'EEPROM peut-être écrite et lue mot par mot,
alors que la Flash ne peut être effacée que par pages (la taille des pages étant en constante diminution).
Enfin la densité de la mémoire Flash est plus importante, ce qui permet la réalisation de puces
contenant plusieurs centaines de Mégaoctets. Des EEPROM sont ainsi préférentiellement utilisées
pour la mémorisation de données de configuration et la mémoire Flash pour du code programmable
(programmes informatiques).
On qualifie de flashage l'action consistant à reprogrammer une EEPROM
III-La mémoire vive (RAM) :
III-1-Types de mémoires vives :
On distingue généralement deux grandes catégories de mémoires vives :
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%