TP 3 : Tracker Solaire

Automatismes – cycle ingénieur ITII
TP 3 : Tracker Solaire
1. Présentation du système.
•Introduction :
Le système à commander est basé sur le pricnipe du « tracker solaire » qui consiste à optimiser la récupération du
rayonnement solaire par des panneaux photovoltaïques en suivant la course du solaire au cours de la journée.
Diverses technologies existent (1 ou 2 axes de rotation, suivi en boucle ouverte ou boucle fermée...). La quantité
d'énergie récupérée peut ainsi être nettement supérieure à celle obtenue avec un panneau fixe (gains de l'ordre de
20 à 30%).
On étudiera à travers ce TP un module destiné à fournir une alimentation autonome avec stockage 24Vcc à une
installation électrique TBTS (type éclairage par exemple). L'énergie est donc produite à partir d'un panneau
photovoltaïque qui est connecté à un régulateur permettant la charge de batteries.
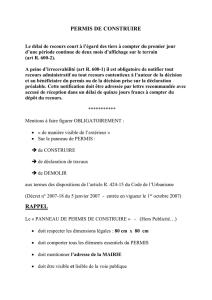
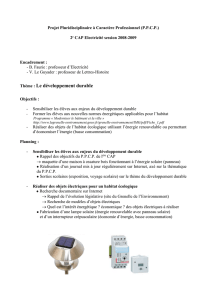
1 – Panneau photoviltaïque
2 – Capteur potentiométrique
+ codeur incrémental pour la
mesure de position
3 – Axe de rotation
4 – Coffret de commande (API
+ batteries)

ITII Tracker Solaire Automatismes
•Description de la partie commande.
Désignation : Référence : Rôle :
API 750-841 (..FW12) exécute le programme d'automatisation et assure la
supervision du système. Adresse IP : 192.168.0.168
Carte 4 entrées TOR 750-432 fournit au programme l'état des détecteurs présents
sur la P.O
Carte 8 sorties TOR 750-530 Permet de commander l'éclairage, le choix de la
mesure de batterie, le basculement de l'alimentation
Carte de commande moteur 750-636 Pilote le moteur afin de positionner l'axe du panneau
solaire entre -60° et +60°. Réalise également une
mesure de position via un codeur incrémental.
Carte 2 entrées analogiques 0-5A 750-475/0020-0000 Assure la mesure du courant de charge des batteries,
ainsi que le courant consommé par le dispositif
d'éclairage.
Carte 2 entrées analogiques 0-30V 750-483 Permet de mesurer la tension aux bornes des
batteries ainsi que la tension délivrée par le capteur
de position angulaire.
•Liste des Entrées/sorties du système.
Mnémonique : Adresse : Fonction :
FC_OUEST %IX0.14 Fin de course : axe en butée Ouest
FC_EST %IX0.15 Fin de course : axe en butée Est
Sel_bat %QX3.0 Commande du relais de sélection de la batterie à mesurer (tension)
Sel_source %QX3.1 Commande du relais de sélection de la source d'énergie à utiliser pour
l'éclairage (batteries ou réseau)
L1 %QX3.2 Commande de la lampe 1
L2 %QX3.3 Commande de la lampe 2
Depl_OUEST %QX0.0 Mise en rotation du moteur : déplacement du panneau vers l'OUEST
Depl_EST %QX0.1 Mise en rotation du moteur : déplacement du panneau vers l'EST
V_bat %IW5 Mesure de la tension aux bornes des batteries
V_pos %IW6 Mesure de la tension aux bornes du potentiomètre de position.
Imot %IW3 Mesure du courant consommé parle moteur
Iecl %IW4 Mesure du courant consommé par l'éclairage
Codeur %IW1 Comptabilise les impulsions du codeur (env +/- 1 par degré)
2/6

ITII Tracker Solaire Automatismes
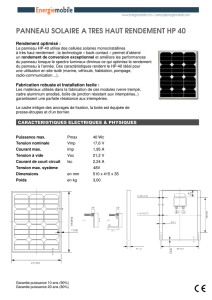
• Schéma des parties commande et puissance :
2. Cahier des charges.
•Positionnement du panneau :
Pour la phase de test correspondant au TP, le positionnement sera géré de la manière suivante :
– A la mise sous tension, une phase d'initialisation va permettre au système de déterminer les positions
angulaires correspondant aux butées Est et Ouest :
– Le panneau est mis en rotation jusqu'en butée Est. Lorsque la butée est atteinte, après 1s
d'attente, les valeurs de « Codeur » et de « Vpos » sont mémorisées respectivement dans VPOS_MIN
et CMIN ;
– Le panneau est ensuite mis en rotation jusqu'en butée Ouest. 1S après que la butée aie été
atteinte, les valeurs de « Codeur » et de « Vpos » sont mémorisées respectivement dans VPOS_MAX
et CMAX ;
– Le cycle normal de fonctionnement va ensuite se dérouler (jusqu'à ce que le système soit mis hors tension) :
– Le système attend que l'heure de début de journée soit atteinte (pour les besoins du TP, on
prendra l'heure du PC au moment du chargement du programme + 1 mn)
– Toutes les 20s, la panneau effectue une rotation de 15° vers l'ouest.
– Le système revient en position initiale lorsque la butée Ouest est atteinte.
•Mesure de la tension des batteries :
Le programme mesure sur la même entrée analogique, tour à tour (toutes les 2,5s), la tension aux borne de la
batterie 1, puis de la batterie 2.
3/6

ITII Tracker Solaire Automatismes
•Supervision :
Un écran de visualisation permet de superviser :
– L'état de charge des batteries, en affichant sous forme de jauge la tension (en volts) présente aux borne de
chacune des batteries;
– Le courant consommé par le moteur, en affichant sous forme de graphe déroulant ces valeurs (en Ampères).
– La signalisation d'un défaut sur la mesure de position (voyant rouge)
3. Préparation.
1. Établir le grafcet "G_suivi" de positionnement du panneau, conformément au fonctionnement décrit dans le
cahier des charges.
Le tableau suivant décrit le comportement des entrées:
Plage de valeurs à mesurer Plage des valeurs délivrées par la carte d'entrées analogiques
-60° < Position angulaire < +60° Vpos_MIN < %IW6 < Vpos_MAX
0V < Tension batteries < 30V 0 < %IW5 < 32767
0A < Courant < 5A 0 < %IW3 < 32767
Plage de valeurs à mesurer Plage des valeurs délivrées par le codeur
-60° < Position angulaire < +60° CMIN < %IW1 < CMAX
2. En vous aidant de ce tableau, établir les relations entre les mot d'entrée des cartes analogiques et...
–la position angulaire (en degrés) de l'axe de rotation du panneau
–la tension des batteries,
–les courants (batterie et lampes)
Ces relations sont de la forme : Valeur_a_mesurer = a x Mot_d_entrée + b
3. Faire la même chose pour la relation entre le codeur incrémental et la position angulaire.
4/6

ITII Tracker Solaire Automatismes
4. Programmation.
1. Créez un projet CoDeSys correctement configuré, avec la configuration et les mnémoniques indiqués en page
2, et un programme principal en langage CFC. Transférer ce programme vide dans l'automate et tester le
bon fonctionnement de toutes les entrées et sorties du système.
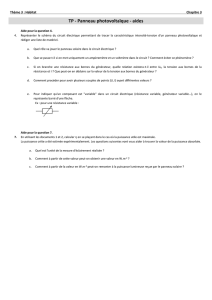
La structure finale programme principal, sera la suivante :
•Le programme "calc_pos" (langage ST) calcule, dans une variable "Pos" au format "REAL", la position angulaire du
panneau en degrés à partir de la tension délivrée par le capteur de position potentiomètrique, en utilisant la
relation trouvée à la question 2 de la préparation. Il calcule aussi dans la variable "Pos_Codeur" cette même
position mais cette fois à partir des informations fournies par le codeur.
Lorsque la différence entre les deux mesures est supérieure à 5 %, la sortie booléenne « erreur » s'active, ce qui
aura pour effet de stopper le déplacement du panneau.
•Le bloc fonctionnel G1 (langage SFC) gère le positionnement du panneau (point 1 du cahier des charges) :
initialisation + fonctionnement normal.
•Le bloc fonctionnel G2 (langage SFC) commute le relais de sélection de la batterie à mesurer, afin d'aiguiller
alternativement l'une ou l'autre des tensions (aux bornes de B1 et B2) vers l'entrée analogique EA1. Ce
programme permet en outre de stocker dans 2 variables Vbat1 et Vbat2 (format REAL) les tensions
correspondantes en volts. (point 2 du cahier des charges).
•Les blocs '4' et '0' permettent de récupérer la variable d'horodatage de l'API et d'en extraire l'heure du jour.
2. Créez le programme "calc_pos" en langage ST, et implantez le calcul conformément au cahier des charges.
Appelez ce programme dans PLC_PRG, chargez le programme dans l'API et validez son fonctionnement.
3. Créez le programme "suivi_soleil" en langage SFC, et implantez le grafcet conformément au cahier des
charges. Appelez ce programme dans PLC_PRG, chargez le programme dans l'API et validez son
fonctionnement.
4. Créez le programme "Mesure_batt" en langage SFC, et implantez le grafcet conformément au cahier des
charges (les calculs seront réalisés dans des étapes d'entrée en langage ST - cf document de prise en main).
Appelez ce programme dans PLC_PRG, chargez le programme dans l'API et validez son fonctionnement.
5/6
 6
6
1
/
6
100%