Cours Imagerie et Observation de la Terre depuis l`Espace TD

p. 1/4
Cours Imagerie et Observation de la Terre depuis l’Espace
TD Géodésie GPS
Dans ce TD, on s’intéresse à la cinématique dans l’Est de la Méditerranée et sa relation à un segment
de faille.
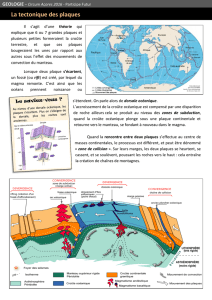
1. Le contexte géodynamique de la Méditerranée orientale
Figure 1 : cadre géodynamique (a) et carte de la zone d’étude (b)
Q1 : Donner le nom des plaques impliquées dans la zone d’étude et leur cinématique par rapport à
l’Eurasie

p. 2/4
Q2 : Quels régimes de déformation sont possibles dans la zone d’étude ?
2. Calcul de la vitesse à partir d’une série temporelle
Les mesures GPS du point PT01 sont représentées sur la figure 2.
Figure 2 : Série temporelle du point PT01. La série temporelle est exprimée par rapport à la plaque
Arabie Fixe.
Q3 : Estimer graphiquement la vitesse du point PT01 pour les composantes Est & Nord
Q4 : Calculer sa vitesse à partir du premier et du dernier point de la série
Q5 : Pourquoi les vitesses ne s’alignent pas exactement sur une droite ?
Q6 : Par quelle méthode pourrait-on estimer la vitesse en utilisant toutes les observations ?
Q7 : Donner son azimut et la norme du vecteur vitesse de PT01
Q8 : Quel est le régime de la faille séparant les plaques Nubie et Arabie dans la zone étudiée ?
3. Démonstration de quelques formules pour le mouvement des plaques

p. 3/4
On défini le point P, pôle de rotation d’une plaque tectonique quelconque en fonction d’une autre
plaque, par sa longitude, latitude et une vitesse de rotation (λP, ϕP, ωP). Soit un point M quelconque
situé sur cette même plaque tectonique et caractérisé par sa longitude et sa latitude (λM, ϕM).
Le but de cette première partie est de déterminer les composantes Est et Nord (𝑉
!
!,𝑉
!
!) du vecteur
vitesse de mouvement de la plaque au point M : 𝑉
!
!.
En vous aidant de la Figure 1 :
Q9 : Exprimez la norme du vecteur vitesse horizontale au point M 𝑉
!
! en introduisant θ, la distance
angulaire entre le pôle de rotation et le point M.
Q10 : Exprimez θ en fonction des coordonnées du pôle de rotation et de celles du point M.
Les expressions précédentes nous ont permis de déterminer la norme du vecteur vitesse de
déplacement horizontal. Nous devons maintenant déterminer l’azimut β du vecteur vitesse pour en
avoir une description complète. Tout d’abord :
Q11 : Déduisez, en vous aidant de la Figure 1, une expression de β en fonction de C.
Q12 : Exprimez sin 𝐶 en vous aidant de la relation : sin 𝑎sin 𝐴=sin 𝑐sin 𝐶.
4. Comparaison des vitesses de plaques avec les mesures GPS locales
La Figure 2 présente les pôles de rotation de la plaque Afrique/Nubie dans le référentiel Eurasie fixe
pour les modèles NUVEL1 A et GPS.
Figure 1: Schéma illustrant le repérage sur une sphère.

p. 4/4
Q13 En vous servant des relations établies dans la première partie et des valeurs fournies dans le
tableau 1, calculez la vitesse prédite par les modèles cinématiques pour le point PT01
Q14 Quelles conclusions tirer de la comparaison entre les modèles globaux & les mesures GPS ?
Q15 : A quel endroit faudrait-il mesurer par GPS pour discriminer les différentes hypothèses ?
Q16 : Est-ce que la paléo-sismologie peut aider dans ce cas à discriminer les différentes hypothèses ?
Tableau 1: Pôle de rotation de la plaque Nubie dans le référentiel Arabie fixe, pour les modèle MORVEL (DeMets et al.,
2010).
Modèle
Plaques
ϕP (°)
λP (°)
ωP (°.Ma-1)
MORVEL
Nubie-Arabie
-32.7
-156.1
0.38
GPS
Sinaï-Arabie
32.8
28.4
0.37
Tableau 2: Coordonnées des points de la Figure 1
#
Lat. (°)
Long. (°)
P1
32.05
34.8
P2
32.05
35.1
P3
32.05
35.4
P4
32.05
35.7
P5
32.05
36.0
P6
32.05
36.3
1
/
4
100%