Actionneur électrique

Type avec entrée de données de positionnement
Série LECP6/LECA6
Type sans programmation
Série LECP1
Type à entrées impulsionnelles
Série LECPA
Pour Codeur absolu
Type à entrées impulsionnelles
Série LECSB
Type d'entrée CC-Link Direct
Série LECSC
Type SSCNET III
Série LECSS
Pour codeur incrémental
Type à entrées impulsionnelles/
Type à positionnement
Série LECSA
Moteur pas à pas
(Servo/24 Vcc)
Servomoteur AC
Servomoteur (24 Vcc)
n
t
n
elles
/
nt
Contrôleur Contrôleur
∗ Non compatible avec la norme UL
64 points de positionnement
14 points de positionnement
e
s
c
t
m
e
UL
Modèle guidé
Course max. : 2000 mm
Vitesse max. : 2000 mm/s
Entraînement par vis à billes Série LEFS
Entraînement par courroie Série LEFB
Taille : 16, 25, 32, 40
Taille : 16, 25, 32
Vitesse max. : 2000 mm/s
Course max. : 3000 mm
Accélération et décélération max. :
20000
mm/s2
Moteur à montage vers le bas également disponible
Entraînement par courroie Série LEFB
Taille : 25, 32, 40
Entraînement par vis à billes Série LEFS
Taille : 25, 32, 40
Type
Type
Moteur pas à pas (Servo/24 Vcc)
T
Servomoteur (24 Vcc)
Servomoteur AC
®
RoHS
∗ Non compatible avec la norme UL
Charge max. : 60 kg
Répétitivité de positionnement : ±0.02 mm
Salle blanche également disponible
Type moteur parallèle
Capacité de transfert à vitesse élevée améliorée.
Accélération et décélération élevées : 20000 mm/s2
Type à entrées impulsionnelles
Avec Codeur absolu interne (Pour LECSB/C/S)
Salle blanche également disponible
Type moteur parallèle
e
e
E
F
B
p
è
l
e
é
ri
e
LEFS
e
Ta
il
m
éliorée.
0
00 mm/s
2
)
Séri
e
LEFS
e
T
mm
Série
LEFB
e
LEFS
11-LEFS
Salle blanche
11-LEFS
Salle blanche
arallèle
arallèle
NouveauNouveau
NouveauNouveau
Actionneur électrique
CAT.EUS100-87D-FR
Série LEF
Nouveau
Nouveau

Entraînement par vis à billes/Série LEFS
Taille : 16, 25, 32, 40
Charge max. : 60 kg
Répétitivité de positionnement : ±0.02 mm
entraînement par courroie
/
Série
LEFB Taille : 16, 25, 32
Course max. : 2000 mm
Vitesse max. : 2000 mm/s
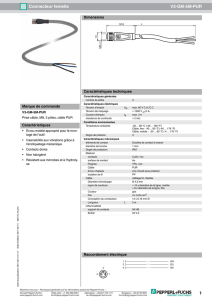
Trou de piétage
Hauteur
Vis à billes
Courroie
Hauteur
Modèle guidé,
version basse
Prévient la chute en cas de panne électrique.
(maintenu)∗
∗
L'actionneur LEFB avec entraînement par courroie ne peut pas
être utilisé pour des applications avec montage vertical.
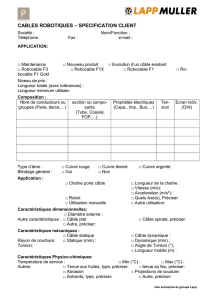
Série LEF
Vitesse
Charge
Moteur pas à pas
Servomoteur
Moteurs compatibles
Moteur pas à pas (servo/ 24 Vcc)
Idéal pour transférer des charges
lourdes à une vitesse faible
Servomoteur (24 Vcc)
Stable à vitesse élevée et silencieux
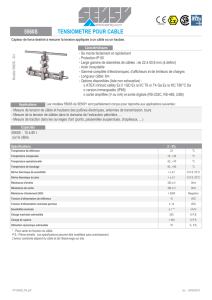
Compact
Réduction de la hauteur/largeur d'environ
50%
La surface supérieure de la table et le moteur sont au même niveau.
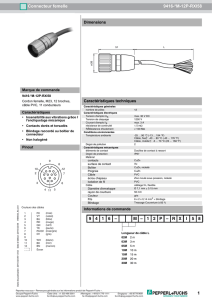
Possibilité de choisir la position
du moteur parmi deux sens
de montage.
Type moteur parallèle
Réduction de la longueur totale et de la hauteur d'environ
15%
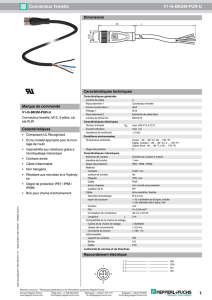
Fixation aisée du corps/
Diminution du temps d'installation
Le corps principal peut être
monté sans que le
couvercle externe
soit retiré, etc.
∗ Par rapport à la série SMC LJ1
Bande externe incluse de série
Elle couvre le guidage, les vis à billes et
la courroie.
Elle empêche les projections de graisse
et l'introduction de corps étrangers.
Moteur pas à pas (Servo/24 Vcc)
Servomoteur (24 Vcc)
Modèle guidé,
version basse
Taille Hauteur [mm]
16
25
32
40
40
48
60
68
frein activé par manque de courant
(en option)
Réduction de
la dimension
parallèle
∗ Par rapport au modèle axial
parallèle Axial
Axial
Pour le moteur
en ligne
Pièce
Table
Pièce
Interférence
Moteur
Pièce
Table
NouveauNouveau
NouveauNouveau
Caractéristiques 1

Vitesse max. : 2000 mm/s
Course max. : 3000 mm
Accélération et décélération max. : 20000 mm/s2
Puissance moteur élevée (100/200/400 W)
Capacité de transfert à vitesse élevée
améliorée.
Compatible avec des accélérations et
décélérations élevées : 20000 mm/s
2
Entrées impulsionnelles
Avec codeur absolu interne
(Pour LECSB/C/S)
Modèle avec moteur à
montage par le bas
Entraînement par vis à billes/Série LEFS Taille : 25, 32, 40
Servomoteur AC
Entraînement par courroie/Série LEFB Taille : 25, 32, 40
Entraînement par vis à billes/Série 11-LEFS
Vitesse
Charge
Moteur pas à pas
Servomoteur AC
Servomoteur
Actionneur électrique/Modèle guidé
La pièce n'interfère pas avec le moteur.
Pièce
Raccordement du vide intégré
Le corps principal peut être monté sans avoir à retirer
le couvercle externe, etc.
Caractéristique de guide linéaire intégré au corps
∗1 Les changements dépendent du débit d'aspiration.
Reportez-vous aux pages 8 et 79 pour plus de détails.
∗2 Classe 10 (Fed.Std.209E)
Orifice du vide
Vide
ISO Classe 4∗1, ∗2 (ISO14644-1) !
Salle blanche
L'orifice de
raccordement au vide
permet de maîtriser la
pollution liée à la
génération de
particules du guide et
de la vis à billes.
NouveauNouveau
e
o
veve
N
o
N
o
uveau
uve
N
o
u
o
u
v
e
a
N
ou
auau
N
o
N
o
u
ouv
uv
e
v
e
a
e
a
u
au
Caractéristiques 2

Entraînement par vis à billes/Série LEFS
Entraînement par courroie/Série LEFB
∗1 La taille correspond à l'alésage du vérin pneumatique pour une force identique. (Pour l'entraînement par vis à billes)
∗2 Consulter SMC pour toutes les courses non standard car elles sont produites en tant qu’exécutions spéciales.
∗3 Version salle blanche, consultez les pages 22 et 96.
∗1 La taille correspond à l'alésage du vérin pneumatique pour une force identique. (Pour l'entraînement par vis à billes)
∗2 Consulter SMC pour toutes les courses non standard car elles sont produites en tant qu’exécutions spéciales.
∗3 L'actionneur avec entraînement par courroie ne peut pas être utilisé verticalement pour des applications.
Série LEF
Séries / Versions
Exemples d'applications
Positionnement
précis des pièces
Transfert de charge et de décharge
des pièces
48
48
48
48
48
54
54
54
300, 500, 600, 700, 800, 900, 1000
300 ,500 ,600, 700, 800, 900, 1000
300, 500 ,600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 500, 600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 500, 600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000, 2500, 3000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000, 2500
Type ∗1
Taille
∗3
Longueur
[mm] Course [mm]∗2
Type ∗1
Taille
Pas équivalent
[mm] Course [mm]∗2
50 100, 150, 200, 250, 300, 350, 400, 450, 500
50 100, 150, 200, 250, 300, 350, 400, 450, 500
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800, 850, 900, 950, 1000
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800, 850, 900, 950, 1000
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800
Moteur pas à pas
(Servo/24 Vcc)
Servomoteur
(24 Vcc)
Servomoteur AC
16
25
32
40
16
25
25
32
40
5
10
6
12
8
16
10
20
5
10
6
12
6
12
8
16
10
20
16
25
32
16
25
25
32
40
Moteur pas à pas
(Servo/24 Vcc)
Servomoteur
(24 Vcc)
Servomoteur AC
Modèle pour salle blanche
Modèle pour salle blanche
Modèle pour salle blanche
∗3
∗3
Entraînement par vis à billes/Série LEFS
Entraînement par courroie/Série LEFB
∗1 La taille correspond à l'alésage du vérin pneumatique pour une force identique. (Pour l'entraînement par vis à billes)
∗2 Consulter SMC pour toutes les courses non standard car elles sont produites en tant qu’exécutions spéciales.
∗3 Version salle blanche, consultez les pages 22 et 96.
∗1 La taille correspond à l'alésage du vérin pneumatique pour une force identique. (Pour l'entraînement par vis à billes)
∗2 Consulter SMC pour toutes les courses non standard car elles sont produites en tant qu’exécutions spéciales.
∗3 L'actionneur avec entraînement par courroie ne peut pas être utilisé verticalement pour des applications.
Série LEF
Séries / Versions
Exemples d'applications
Positionnement
précis des pièces
Transfert de charge et de décharge
des pièces
48
48
48
48
48
54
54
54
300, 500, 600, 700, 800, 900, 1000
300 ,500 ,600, 700, 800, 900, 1000
300, 500 ,600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 500, 600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 500, 600, 700, 800, 900, 1000, 1200, 1500, 1800, 2000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000, 2500, 3000
300, 400, 500, 600, 700, 800, 900, 1000, (1100), 1200, (1300), (1400), 1500, (1600), (1700), (1800), (1900), 2000, 2500
Type ∗1
Taille
∗3
Longueur
[mm] Course [mm]∗2
Type ∗1
Taille
Pas équivalent
[mm] Course [mm]∗2
50 100, 150, 200, 250, 300, 350, 400, 450, 500
50 100, 150, 200, 250, 300, 350, 400, 450, 500
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800, 850, 900, 950, 1000
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600
150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800, 850, 900, 950, 1000
50 100, 150, 200, 250, 300, 350, 400, 450, 500, 550, 600, 650, 700, 750, 800
Moteur pas à pas
(Servo/24 Vcc)
Servomoteur
(24 Vcc)
Servomoteur AC
16
25
32
40
16
25
25
32
40
5
10
6
12
8
16
10
20
5
10
6
12
6
12
8
16
10
20
16
25
32
16
25
25
32
40
Moteur pas à pas
(Servo/24 Vcc)
Servomoteur
(24 Vcc)
Servomoteur AC
Modèle pour salle blanche
Modèle pour salle blanche
Modèle pour salle blanche
∗3
∗3
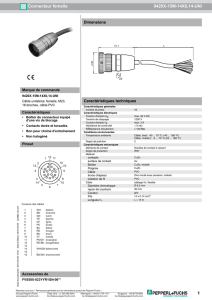
Caractéristiques 3

Actionneur électrique/Modèle guidé
Prise et pose
Transfert vertical
Charge : Horizontale [kg] Page
Vitesse [mm/s] Charge : verticale [kg]
Page 2∗3
Page 72∗3
Charge : Horizontale [kg]∗3Page
Vitesse [mm/s]
Page 28
Page 100
2010 30 2010 3040 50 60 200 400 600 800 1000
5 10 15 20 25 500 1000 1500 2000
Actionneur électrique/Modèle guidé
Prise et pose
Transfert vertical
Charge : Horizontale [kg] Page
Vitesse [mm/s] Charge : verticale [kg]
Page 2∗3
Page 72∗3
Charge : Horizontale [kg]∗3Page
Vitesse [mm/s]
Page 28
Page 100
2010 30 2010 3040 50 60 200 400 600 800 1000
5 10 15 20 25 500 1000 1500 2000
Caractéristiques 4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
1
/
152
100%