Présentation PIC16

E.M.E LES MICROCONTROLEURS PIC16 Marc JOUBERT
1STI
Page 1
LES MICROCONTRÔLEURS PIC 16
Introduction
Ce chapitre consacré à la présentation des microcontrôleurs PIC est entièrement décrit dans la présentation
Powerpoint "Présentation_PIC16.pps".
Afin de pouvoir apprécier les caractéristiques propres aux PIC, de nombreux points sont abordés en comparaison
avec un système minimum à microprocesseur à 6809.
Travail à effectuer
Compléter le document
support à l'aide de la présentation Powerpoint "Présentation_PIC16.pps". Les
réponses apportées devront être développées
clairement, précisément et avec soin
. A noter que ce
document constituera par la suite un document de référence.
Cette étude fera l'objet d'une synthèse commune à l'issu du travail.
→
S
ommair
e
Clic
simple
→
Animation suivante
Clic
sur
Sommaire
Présentation
réalisée par BERNARD Bruno
adaptée et modifiée par Marc JOUBERT
Systèmes microprogrammés

E.M.E LES MICROCONTROLEURS PIC16 Marc JOUBERT
1STI
Page 2
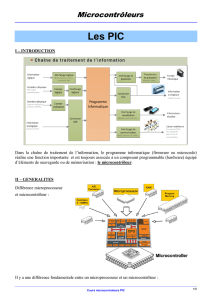
1.
Microcontrôleur ou Microprocesseur ?
Quelles sont les deux
types de structures
(circuits) les plus répandus dans les systèmes microprogrammés ?
Donner un exemple de chaque.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Quelles
contraintes
présente le
système minimum à microprocesseur
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Expliquer en quoi un
microcontrôleur
tel que le
PIC
permet de s'affranchir de ces contraintes.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Lister les différentes
ressources externes
nécessaires au
microprocesseur
pour le bon fonctionnement du
système minimum.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Donner les différentes
ressources internes
proposées par les
microcontrôleurs PIC
.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
En comparant les ressources dont disposent les deux types de structures microprogrammées, peut-on conclure
qu'un microcontrôleur PIC est en fait un système minimum à lui tout seul ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...

E.M.E LES MICROCONTROLEURS PIC16 Marc JOUBERT
1STI
Page 3
2.
Architecture interne: Von Neumann ou Harvard ?
Qu'est-ce que
l'architecture interne
d'un circuit ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Comment s'appellent les
deux types d'architectures
les plus rencontrées ?
Donner un exemple de circuits possédant ces architectures.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Pour les deux types d'architecture, que contient le circuit appelé
mémoire de programme
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Considérons une ligne de
programme assembleur
dont le rôle est de charger un registre avec l'octet $FF.
Dans le cas d'un système minimum à 6809 et d'un microcontrôleur PIC :
o Identifier
l'instruction
et
l'opérande
associée.
o Donner le codage en
langage machine
correspondant.
o
Ranger
cette instruction et son opérande en mémoire de programme à
l'adresse $0100
.
6809 (Von Neumann) PIC (Harvard)
Reg A Å $FF Reg W Å $FF
LDA # $FF MOVLW $FF
$ 0100 $ 0100

E.M.E LES MICROCONTROLEURS PIC16 Marc JOUBERT
1STI
Page 4
Dans les deux cas précédents,
combien de cases mémoire
sont nécessaires pour stocker cette instruction et
son opérande ?
………………………………………………………….………………...
………………………………………………………….………………...
………………………………………………………….………………...
………………………………………………………….………………...
………………………………………………………….………………...
………………………………………………………….………………...
Lorsque le programme est exécuté par le
système minimum
:
o Par quoi est acheminée
l'instruction
jusqu'au
6809
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
o Par quoi est acheminé
l'opérande
jusqu'au
6809
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
o L'instruction et son opérande sont-elles acheminées au 6809 de façon
simultanée
ou l'une après l'autre ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Lorsque le programme est exécuté par le
PIC :
o Par quoi est acheminée
l'instruction
jusqu'à l'unité de calculs ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
o Par quoi est acheminée
l'opérande
jusqu'à l'unité de calculs ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
o L'instruction et son opérande sont-elles acheminées à l'unité de calcul de façon
simultanée
ou l'une après
l'autre ?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Quel est le rôle du
décodeur d'instructions
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Quelle
architecture
semble être la plus
rapide
pour exécuter une instruction et son opérande ?
………………………………………………………………………………………………………………………………………………………………...

E.M.E LES MICROCONTROLEURS PIC16 Marc JOUBERT
1STI
Page 5
3.
Les registres internes
Citer les 5
registres internes
des
microcontrôleurs PIC
les plus souvent utilisés.
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
3.1 Registre de travail (W)
Quel est le rôle du
registre de travail W
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Quelle est sa
taille
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Qu'est-ce qu'un
littéral
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
Donner un exemple de chargement du
registre W
avec la valeur
6B
.
………………………………………………………….………………….…………...
………………………………………………………………….…….………………...
3.2 Registres d'entrées/sorties (PORT)
Quel est le rôle des
registres d'entrées / sorties PORT
?
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
………………………………………………………………………………………………………………………………………………………………...
W
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%