BifurcationMecanique ChauffeEauSolaire DepotLaiton

DS SCIENCES PHYSIQUES MATHSPÉ
calculatrice: autorisée
durée: 4 heures
Sujet
! "
!!#$%
&'(%
)* #$
!!!!* +
,-./
!0 /
!!, /
!!!,-.1
&&- 2
)2
,3- .42
!(5.62
!!'# 2"
!!!*#2"
27%

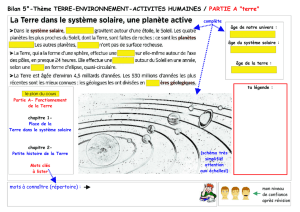
Un exemple simple de servomécanisme à
bifurcation mécanique
8*#$
,9#(9*(:
;2//
8$#$
Sd
(!*(
O A2B A
3
l=9"m
9 (
OB
0*
O
<
B
9
ROxyz
9 (9 *
B
*
Oz
0*((9-49
A2
A
m=9kg
=#$((
m
>
>
8(
Ozx '
R'Ox ' y ' z
(9
g
7%
.

-9
g=19/2m s−
9
*(
Oz ,
OA2
(
OA2
Oz
*(
Ox , Ox '
9
/
I. Solide tournant
8($?*
B
*
Oz
( (
OA2
BA2
0#$@
A@(A8
S
(
˙
*
Oz
8
R
2 59
R'
?
ex ' ,
ey ' ,
ez
9
˙
9
¨
l ,
•
A2
R
•
A2
R
59
R'
?
ex ' ,
ey ' ,
ez
9
˙
9
¨
m ,l ,
•
P
S
R
•
LO
S
R
O
" 8(
R
O
O
*
B
S
•&*-$
O
9
S
9
R
O
˙
9
¨
m , g , l ,
ex ' ,
ey ' ,
ez
•B
S
C,B
D
% !*# (
O A2B A
3
O A2B
•
R
O
(
O A2B A
@
"7%

AD
•,
=
•BE
Oz
O
?
O
B
S
•0.(9 .
˙
9-
D
•**(
Ek
.(
˙
m ,l ,
DF9E99
˙
9**(
II. Système déformable astreint à tourner uniformément
0*
B
(*
9
Ozx '
(
O A2B A
(
= ez
= ˙
R
9 G
Mm=Mm
ez
@(A0
R'
(
(
R
=
A. Énergie potentielle
+ B.
Sd
D
B9
Mm
9#$
Sd
R
H...C(
Sd
R
(D
D
%7%

/ B
R'
(:H...C(
Sd
R'
( B
.
R'
CC(D
9
R'
1 5
R'
?
ex ' ,
ey ' ,
ez
9
A2
R'
˙
$
2B**(
Ek'
Sd
9
R'
9
˙
$
22B**(
Ep , g
#$8
*((
=/
2F (? $
R'Ox ' y ' z
M
m
9
v
R'
,
R'
(
R
(
= ez
C
Oz
8 (
H
E -(
M
Oz
8
HM =x '
ex '
9
OM =x '
ex' z
ez
9
v=dx '
dt
ex 'dz
dt
ez
•FC,
M
R'
B
R'
0,.
C(D
•F C C CI
fi , e
M
R'
m
9
9
HM
: @
(A 5
R'
5
CC(
x '
2"8$J 9
R'
(9*(9*?
E ' p ,c=− m l
9(
=
9
*
2%0*(
E ' p
R'
?
E ' p=E
−− u
K
E
u
*
m , g , l ,
=g/l2/
2,
E
!
B. Positions d’équilibre relatif du système astreint à tourner uniformément
2+B *
Sd
R'
@
/
AD &
#...C D
2'*
u2
u2
2/0
u=2
L 0
E ' p
9(
7%
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%