Cours 2 : Imagerie active

2
Cours 2 : Imagerie active
1. Introduction – imagerie de nuit
Il existe plusieurs types de technologies utilisées pour la vision de nuit. On peut citer l’imagerie
passive de nuit qui utilise des détecteurs ultra-sensibles (back-illuminated CCD, low light level
CCD,…) ou des détecteurs munis d’intensificateurs d’image. Ces techniques sont très
performantes et permettent de faire de l’imagerie dans des conditions de luminosité très faible
(lune, étoiles, …), mais nécessitent des temps de pose ou temps d’intégration de plusieurs ms ce
qui les excluent des bon nombre d'applications embarquées.
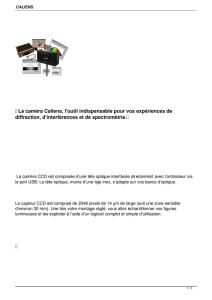
Une autre technique très utilisée pour l’observation de nuit est l’imagerie infrarouge dans les
bandes 3 à 5 µm et 8 à 12 µm (figure 1).
Figure 1 : Rappel des principales fenêtres spectrales pour l'imagerie
Le capteur d’image peut être constitué d’une matrice de microbolomètres qui ne nécessitent pas
de refroidissement ou encore d'une matrices de PtSi ou autres. Ces techniques d’imagerie sont
basées à la fois sur les propriétés d’émissivité des corps ainsi que sur leurs rayonnements
thermiques. Comme pour l’imagerie passive à très faible niveau de lumière, les temps
d’intégration nécessaires pour ce type d’imagerie restent relativement élevés. Une autre
limitation est liée à la longueur d’onde élevée dans l’IR. La fréquence de coupure c
f donnée par
la tâche de diffraction (e1) est inversement proportionnelle à la longueur d’onde, il est donc plus
favorable, en terme de fréquence de coupure de travailler à faible longueur d’onde.
(e1)
La troisième voie possible pour faire de l’observation de nuit est d’utiliser la technique de
l’imagerie active. Dans ce cas, on associe au système d'observation une source d’éclairage
artificielle permettant d’illuminer la scène à observer. Pour respecter la contrainte de temps
d’intégration court, il faut utiliser une source d’éclairage capable de délivrer une forte puissance
d’éclairage pendant la durée d’intégration du récepteur. Cette condition est parfaitement
réalisable avec les sources laser actuelles qui possèdent, en plus, des propriétés de directivité du
faisceau fondamentales pour ce type d’application. L’utilisation de sources laser pulsées permet
de travailler à des longueurs d’onde dans le visible ou le proche IR, correspondant à des

3
FOV
fréquences de coupure (liées à la diffraction) supérieures à celles obtenues dans le cas de
l’imagerie IR. Le grand avantage de cette technique est qu’elle permet de travailler même en
l’absence totale de lumière (ciel couvert de nuit).
C’est cette technique que nous allons étudier.
2. Principe de l'imagerie active
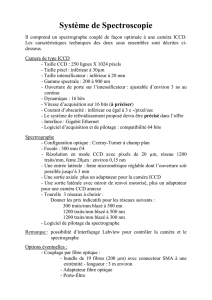
Figure 2: illumination de scènes et réception d'images
Exemple de système d'imagerie active à crénelage temporel (ISL)
La technique de l’imagerie active, qui consiste à associer au système d’imagerie sa propre source
d’éclairage, comporte plusieurs variantes.
La variante la plus simple consiste à éclairer la scène en continu et à limiter le temps de pose en
commandant la caméra par un obturateur.
On peut aussi éclairer la scène en mode impulsionnel (correspondant au temps de pose) et
maintenir la caméra ouverte en mode acquisition continue. Ce type de fonctionnement est par
contre très sensible aux lumières parasites provenant de la scène.
Pour éliminer le problème des lumières parasites et pour augmenter l’efficacité de l’éclairage, on
synchronise l’éclairage avec l’ouverture de la caméra (
∆
t=0). Dans ce mode de fonctionnement
le temps d’ouverture de la caméra correspond à la durée de l'impulsion d'éclairage.
Lorsqu'on synchronise l'ouverture de la caméra avec l'émission laser, la rétrodiffusion de la
lumière sur les particules présentes dans l'atmosphère (brouillard, poussière,…) vient perturber la
∆
t
Emetteur
Récepteur
θ

4
qualité d'image (effet feux de route dans le brouillard) et la diffusion avant vient atténuer le
signal de retour (voir cours sur la télémétrie impulsionnelle).
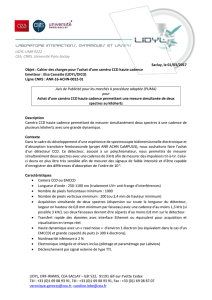
Pour contourner ces limitations on a recours à une technique appelée crénelage temporel (figure
3) ou "range-gating" qui est basée sur le temps de vol d’une très courte impulsion de lumière (de
l'ordre de la ns). Dans ce cas on va décaler temporellement l'émission laser et l'ouverture de la
caméra (
∆
t
≠
0).
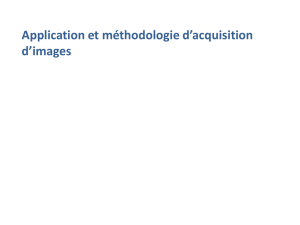
Fig. 3 : Principe de fonctionnement du crénelage temporel
Le principe de fonctionnement du crénelage temporel est le suivant :
Au départ, à t0, la caméra est fermée par son obturateur ; à t1, l’impulsion laser est émise en
direction de la scène, l’obturateur est toujours inactif, la caméra n’est pas affectée par la lumière
rétro-diffusée par les particules atmosphériques. A t2, l’impulsion laser qui s’est propagée
jusqu’à la scène est réfléchie en direction de la caméra. A ce moment, l’obturateur est toujours
inactif. A t3, la lumière réfléchie par la scène atteint la caméra, l’obturateur est ouvert de façon à
récupérer cette image. Le délai entre l’émission de l’impulsion laser et l’activation de
l’obturateur est déterminé de sorte que la caméra ne voit que l'information provenant de la scène.
Le temps d’ouverture (s’il est supérieur à la durée de l’impulsion) de la caméra détermine la
profondeur de scène qui sera enregistrée. A l’instant t4, l’obturateur est de nouveau inactif, de
sorte que la caméra reste protégée de la lumière parasite.
Cette technique complexe est recommandée lorsque l’on veut faire de l’imagerie dans des
conditions atmosphériques difficiles telles que brouillard, tempête de neige, nuage de poussière,
fumée,…
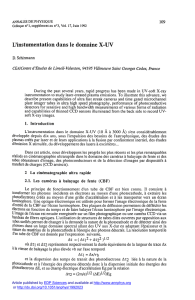
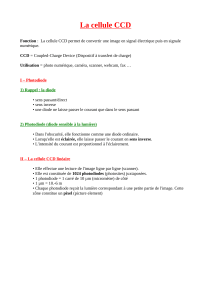
Avant de passer à l'aspect théorique, une illustration des performances de cette technique est
donnée sur la figure 4 qui représente une même scène enregistrées de nuit pendant une tempête
de neige avec et sans crénelage temporel.

5
Fig. 4 : Images enregistrées lors d'une tempête de neige
(avec et sans crénelage temporel)
3. Equations de liaison
3.1 Eclairement dans le plan image
Figure 5 : Rétrodiffusion de l'impulsion
Reprenons l'équation (e10) (qui devient (e1) ici) de la télémétrie qui définit l'éclairement
énergétique E en [W.m-2] d'une surface réceptrice A après éclairement d'une surface S par un
faisceau laser selon la figure ci-dessus.
(e1)
Avec :
R : Coefficient de réflexion ou Albédo de la cible
P : Puissance en [W] du laser d'éclairage
τ
: Transmission de l'atmosphère, avec : d
e
α
τ
−
=
d : Distance système cible
A travers une optique de focalisation (objectif), on définit l'éclairement énergétique dans le plan
image par :
(e2)

6
avec, (e1) devient, φ étant la pupille de l'objectif :
(e3)
Cette équation montre que si l'on veut augmenter l'éclairement dans le plan image, il faut
augmenter la puissance du laser d'éclairage ou augmenter la pupille d'entrée de l'objectif.
Sim étant lié à S par les caractéristiques de l'objectif qui sont sa pupille
φ
et sa focale f, on peut
écrire :
on peut écrire (e3) sous la forme :
(e4)
Ces équation ne sont valables que dans le cas où la divergence du faisceau laser d'éclairage est
strictement superposée au champ de vue de l'optique (illustration de la figure 2).
3.2 Qualité d'image
3.2.1. La Fonction de Transfert de Modulation théorique et expérimentale
Le niveau de détail nécessaire dans une image dépend du type de mission et du type de cible. La
résolution nécessaire pour un système est croissante suivant que l'on désire Détecter, Reconnaître
ou Identifier un objet dans une image. Le critère de Johnson et le STANAG 3769 sont deux
normes de résolution utilisées par les militaires. Ces normes décrivent pour chaque mission et
type de cible, la résolution nécessaire ou le nombre de points élémentaires dans une dimension
de cible, soit : Détection 1 lp/dmc, Reconnaissance 4 lp/dmc, Identification 6,4 lp/dmc (lp : ligne
pair, dmc : dimension minimale cible)
Les performances du système, du point de vue de la résolution, seront décrites et caractérisées
par la fonction de transfert de modulation. La figure 7 décrit le principe de la FTM.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
1
/
41
100%