Emploi de l`Approche des Vecteurs de Park pour la Détection des

Rev. Energ. Ren. : Valorisation (1999) 71-76
71
Emploi de l’Approche des Vecteurs de Park pour la Détection des Défauts de Barres
dans les Moteurs Asynchrones à Cage d’Ecureuil
M. Benouzza, M. Drif, A.J. Marques Cardos 1 et J.A. Dente 2
Institut d’Electrotechnique, U.S.T.Oran, B.P. 1505, El M’naouar, Oran, Algérie
1 Universidade de Coimbra, Departamento de Engenharia Electrotécnica, P3000, Coimbra, Portugal
2 Instituto Superior Téchnico Lisboa, Portugal
Résumé - Dans cet article, nous présentons une étude basée sur l’application de l’approche des vecteurs de
Park à la détection des défauts de barres dans les moteurs d’induction triphasés. Afin de simuler le
comportement du moteur avec défaut, un modèle mathématique est utilisé, dans lequel la cage est considérée
comme étant un circuit maillé. Les résultats de simulation et expérimentaux obtenus montrent l’intérêt et
l’efficacité de la technique proposée pour la détection des fractures de barres dans le moteur à cage
d’écureuil.
Abstract - In this article, we present a study based on the application of the approach of the vectors of Park
to the detection of the defects of bars in the three-phase engines of induction. In order to simulate the
behaviour of the engine with defect, a mathematical model is used, in which the cage is considered as being a
grid circuit. The results of simulation and experimental obtained show the interest and the efficiency of the
technique suggested for the detection of the fractures of bars in the squirrel-cage engine.
Mots clés: Vecteurs de Park – Défauts de barres – Moteur asynchrone – Simulation.
1. INTRODUCTION
Le moteur asynchrone est certainement la machine électrique la plus fréquemment utilisée dans l’industrie.
Cela tient, surtout s’il s’agit du moteur à cage, à sa grande robustesse, à la facilité avec laquelle on peut le
démarrer, et à son prix de revient [l]. Ces machines sont soumises pendant leur fonctionnement à plusieurs
contraintes de différentes natures. L’accumulation de ces contraintes provoque des défauts dans les différentes
parties du moteur. Ces défauts peuvent aller jusqu’à l’endommagement total du moteur qui paralyse le processus
industriel, ce qui se répercute sur la production [2].
La protection des machines électriques ne peut pas éviter l’apparition de ces défauts et leurs conséquences
sur les machines électriques, puisque l’appareillage de protection n'intervient qu'au dernier stade du défaut, c’est-
à-dire dans le cas critique de l’évolution du défaut [3].
De même la maintenance classique des machines électriques ne peut pas détecter ces défauts dans la plupart
des cas, vu que certains types de défauts échappent aux techniques classiques utilisées dans ce genre de
maintenance, surtout dans le cas de la vérification des différentes parties de la machine lorsqu’elle est en arrêt
(off line) [4].
La détection des défauts dans leur premier stade (maintenance préventive) est devenue une nécessité majeure
afin d’éviter la défaillance totale des machines électriques. De nombreux travaux ont été consacrés à ce nouveau
type de maintenance utilisant différentes techniques de diagnostic. La plupart de ces techniques utilisent les
grandeurs mécaniques (couple, vitesse, vibrations, bruit, etc.) qui demandent l’introduction de capteurs au niveau
de la machine, ce qui est difficile et coûteux dans la plupart des cas [4, 5].
Parmi les méthodes de diagnostic récemment utilisées et surtout celles qui s'orientent vers les grandeurs
électromagnétiques (flux, tension, courant, etc.) [4, 5], la méthode du courant statorique. Cette technique
présente plusieurs avantages par rapport aux autres, surtout s’il s’agit de son implémentation qui n’exige ni
l’introduction de capteurs au niveau de la machine ni l’utilisation d’un équipement coûteux et encombrant, mais
seulement un capteur de courant (transformateur de courant ou sonde à effet Hall), qui donne une image sur le
courant de phase statorique [2].
La sortie du capteur de courant est reliée après amplification et filtrage à un synthétiseur de Park et un
oscilloscope ou relié à un ordinateur [6, 7]. De plus cette technique est utilisée lors du fonctionnement du
moteur (on line), ce qui nous permet de l’utiliser dans la surveillance des machines.
Cette étude est consacrée à l’utilisation de cette technique basée sur le tracé des vecteurs de Park pour la
détection des défauts de barres dans le moteur asynchrone à cage.

M. Benouzza et al.
72
2. APPROCHE DES VECTEURS DE PARK
Cette méthode est basée sur la transformation de Park, à savoir la transformation des grandeurs de la machine
triphasée à celles d’une machine biphasée, selon les deux axes d et q. On obtient de cette transformation les
vecteurs de Park des tensions, des flux et des courants. Cette technique utilise les deux composantes du courant
statorique sd
i et sq
i[6, 7].
Les vecteurs des courants de Park sd
i et sq
i en fonction des courants statoriques ( sqsbsa i,i,i ) s’expriment
comme suit :
scsbsasd i)6/1(i)6/1(i)3/2(i −−= (1)
scsbsq i)2/1(i)2/1(i −= (2)
Dans le cas du moteur sans défaut, la courbe de Lissajou )I(fI sdsq
=
à une forme circulaire centrée à
l’origine et de diamètre égal à l’amplitude du courant statorique correspondant à l’état de fonctionnement du
moteur. Pour le cas du moteur avec défaut, la courbe de Lissajou change en forme et en épaisseur à cause de la
présence des harmoniques crées par le défaut. La stratégie de cette méthode est de comparer les deux courbes de
Lissajou dans les deux cas du moteur avec et sans défaut lors de son fonctionnement [2, 6, 7].
3. MODELE MATHEMATIQUE
Un moteur triphasé à cage est considéré, son rotor est constitué de b
Nbarres isolées, uniformément réparties
sur la surface du rotor et court-circuitées par deux anneaux.
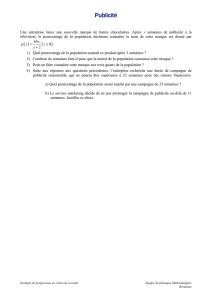
Afin d’étudier ses performances lors de défaut rotorique, on a utilisé un modèle où la cage étant un circuit
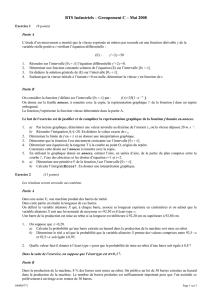
maillé (Fig. 1). Le nombre d’équations différentielles obtenues est égal au nombre de barres plus un (tenant
compte de l’un des deux anneaux) [3, 8].
Fig. 1: Circuit du rotor à cage
Sous les hypothèses simplificatrices classiques [1], le modèle mathématique du moteur d’induction est donné
par l’équation de tension [3, 8] :
[] [][]
I.ZV = (3)
avec:
[] [ ]
t
cba 0 0....... 0 0 0 v v vV = (4)
[] [ ]
t
eNb3r2r1rcba ii ....... i i i i i iI = (5)
[] [] []
[] []
[] [ ]
[] []
+
=pLpL
pLpL
RL
dt
d
L
dt
d
R
Z
r
t
SR
SRS
r
t
SR
SRS
(6)
[]
=
S
S
S
S
R00
0R0
00R
R (7)

JNVER : Emploi de l’Approche des Vecteurs de Park dans la Détection des Défauts…
73
[]
=
cccbca
bcbbba
acabaa
S
LLL
LLL
LLL
L (8)
[]
=
ebeee
e
Nb
r
Nb
r
2
r
Nb
r
1
r
Nb
r
e
Nb
r
2
r
2
r
2
r
1
r
2
r
e
Nb
r
1
r
2
r
1
r
1
r
1
r
r
LNL..LL
LL..LL
......
LL..LL
LL..LL
L (9)
[]
=
crNb2cr1cr
brNb2br1br
arNb2ar1ar
sr
m..mm
m..mm
m..mm
L (10)
[]
−−
−−
−−
=
ebeeee
erbb
ebrb
ebbr
r
RNR..RRR
RRR.00R
.......
.......
.......
R00.RRR
RR0.0RR
R (11)
où : )RR(2R ebr +=
On transforme l’équation (.3) sous la forme matricielle suivante :
[] [] [ ] []
I
dt
d
LI
dt
dL
RV +
+= (12)
d’où :
[] [ ] [] [ ] [ ]
VLI
dt
dL
RLI
dt
d11 −− +
+−= (13)
La cassure de barre est introduite par l’élimination de la ligne et de la colonne correspondante à la barre
cassée dans le système matriciel à intégrer (cassure totale de la barre).
La méthode numérique d’intégration de Runge-Kutta d’ordre 4 a été utilisée pour résoudre le système
d’équations différentielles obtenu du moteur (13).
4. RESULTATS DE SIMULATION
Les paramètres du moteur utilisé en simulation (Annexe). En utilisant le modèle mathématique du moteur
(13), les simulations sont effectuées pour le cas d’un moteur sans défauts dans un premier cas. Dans un
deuxième cas, cas de défaut, une barre, deux barres et quatre barres cassées est considéré.
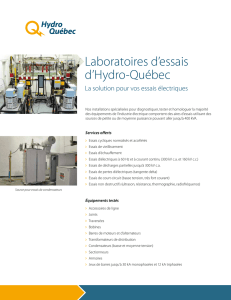
La figure (2a) illustre la forme de Lissajou d’un moteur sain. Elle présente une forme circulaire centrée à
l’origine. La présence de défaut de barres se manifeste par l’augmentation de l’épaisseur de la forme de
Lissajou, (Figs 2b, 2c et 2d), correspondant à la cassure d’une barre, de deux barres et de quatre barres
respectivement.
5. RESULTATS EXPERIMENTAUX
Le moteur utilisé dans les essais pratiques pour l’étude des défauts de barres est un moteur triphasé ABB, du
type MBT 100LB, 50 Hz, 4 pôles, 3 kW, avec plusieurs rotors de même type qu’on peut les changer selon le
nombre de barres cassées. Chacun d’eux est à cage d’écureuil simple avec 28 barres inclinées non-isolées et le

M. Benouzza et al.
74
courant statorique, I (étoile/triangle) = 7,1 / 12,1 A. L’instrumentation de mesure comporte trois capteurs de
courant, un synthétiseur de Park et une carte d’acquisition. L’ensemble est relié à un PC pour la visualisation et
le traitement des signaux captés.
Les essais sont effectués sous une tension constante de 148 V entre phase. Le moteur est initialement testé
avec sa cage intacte, afin d’avoir la forme de Lissajou dans le cas d’un moteur sain. Cette forme de Lissajou
obtenue doit être utilisée comme référence pour le reste des relevés dans le cas du moteur avec défauts. A
chaque fois, un changement du rotor est effectué selon le nombre de barres cassées.
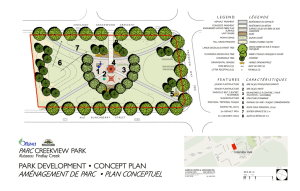
La figure (3a) montre la forme de Lissajou des courants de Park dans le cas d’un moteur sain. Cette forme
diffère de la forme circulaire correspondant aux conditions idéales, ceci est due à la tension appliquée au moteur
qui n’est pas une sinusoïde parfaite.
La fracture de barres se manifeste dans le courant statorique par modulation de l’amplitude de ce dernier à la
fréquence sf2 , où f est la fréquence de la tension d’alimentation et
s
est le glissement du rotor. Ce phénomène
est illustré par l’augmentation de l’épaisseur de la forme de Lissajou. Pour un glissement de 6 %, les figures 3b,
3c et 3d, montrent le cas de cassure d’une barre, de deux barres, et quatre barres respectivement. La
comparaison de la figure 3a avec 3b, 3c et 3d, montre clairement que le défaut de barres est facile à détecter par
la visualisation de la forme de Lissajou des vecteurs de courants de Park, et l’observation de l’augmentation de
son épaisseur.
a
b
c

JNVER : Emploi de l’Approche des Vecteurs de Park dans la Détection des Défauts…
75
d
Fig. 2: Résultats de simulation
(a) cas d’un moteur sain,
(b) cas de cassure d’une barre,
(c) cas de cassure de 02 barres,
(d) cas de cassure de 04 barres.
Fig. 3: Résultats expérimentaux
(a) cas d’un moteur sain,
(b) cas de cassure d’une barre,
(c) cas de cassure de 02 barres,
(d) cas de cassure de 04 barres.
6. CONCLUSION
Dans cette étude, nous avons utilisé une approche basée sur le tracé des vecteurs de Park des courants, pour
la surveillance des moteurs d’induction par ordinateur. La détection des défauts de barres peut être facilement
obtenue par l’observation de l’épaisseur de la courbe de Lissajou. Cela est possible même dans le cas de cassure
d’une seule barre rotorique d’un moteur en charge.
Il est nécessaire de mentionner que l’augmentation de l’épaisseur de la forme de Lissajou n’est pas une
fonction linéaire du degré de défaut (nombre de barres cassées) comme il a été prouvé expérimentalement par
A.J.M. Cardoso, effectuant des essais sur deux moteurs de 28 et 32 barres [3]. Cependant, l’intérêt de la
technique utilisée réside dans la possibilité de détecter le défaut de barres par la déformation de la courbe de
Lissajou par rapport à une référence, qui est celle obtenue dans le cas d’un moteur sain.
ANNEXE
Les paramètres du moteur à cage utilisé en simulation sont :
U = 380 V
n = 2840 tr/mn
f = 50 Hz
b
N = 16
s
R = 9.203
Ω
ls
L = 0.0138 H
b
R = 68.358 Ω
b
L = 0.174 µH
e
R =20.266 Ωµ
Le = 0.0375 µH
2p = 2
 6
6
1
/
6
100%