TD n°4 - Educnet

1
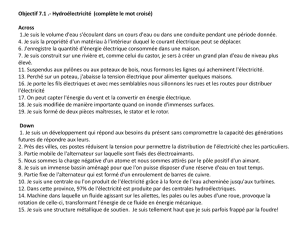
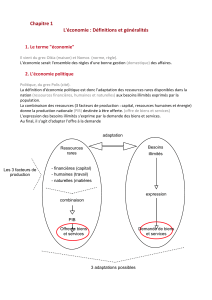
Flexion élastoplastique d’une plaque
On considère un élément de plaque assimilé à un solide parallélépipédique de largeur
l
,
d’épaisseur 2h et d’extension infinie dans la direction Oz transversale à la figure, représenté sur la
figure 1, constitué d’un matériau homogène élastique isotrope (module d’Young E, coefficient de
Poisson
), parfaitement plastique standard, le critère de plasticité étant celui de Tresca de
cohésion égale à C :
02 Cf IIII
(1)
avec IIIIII
contraintes principales.
O
x
y
l
)(t
CE ,,
0),( txTd
h2
O
z
y
)(tM
0
0
0
),(
),( ),(
txT
txT
tx
d
z
d
y
d
x
0
),(),( )(),(
txTtxT
yttx
d
z
d
y
d
x
A
O
x
y
l
)(t
CE ,,
0),( txTd
h2
O
z
y
)(tM
0
0
0
),(
),( ),(
txT
txT
tx
d
z
d
y
d
x
0
),(),( )(),(
txTtxT
yttx
d
z
d
y
d
x
A
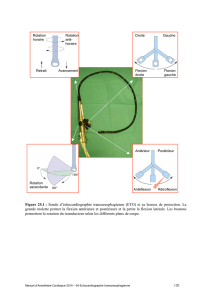
Figure 1. Flexion élastoplastique d’une plaque : données du problème
Cet élément de plaque est soumis à un processus de chargement caractérisé par le jeu de
données suivant :
forces de volume nulles :
0txFd,
(2)
faces horizontales libres de contrainte :
0,,, tzhyxTd
(3)
section origine
)( 0 x
en contact sans frottement avec un plan fixe :
0,,,0,,,0 , 0,,,0 tzyxTtzyxTtzyx d
z
d
y
d
x
(4)

2
section extrémité
)( lx
en contact sans frottement avec un poinçon indéformable auquel
on impose une rotation
)(t
autour de l’axe Az :
0,,,,,, , )(,,, tzylxTtzylxTyttzylx d
z
d
y
d
x
(5)
L’expression de la puissance des efforts extérieurs par unité de longueur selon Oz, s’exerçant
sur cet élément de plaque dans un champ de vitesse cinématiquement admissible avec les données
en déplacements du problème, s’écrit alors :
M
yy .Fρa .TP h
h
xxe
d d d )(
(6)
faisant ainsi apparaître le moment M par unité de longueur le long de Oz autour de l’axe Az, des
efforts appliqués par le poinçon sur la section extrémité
)( lx
, dit moment de flexion, comme
l’unique paramètre de chargement du système. La vitesse généralisée associée n’est autre que la
vitesse de rotation
de ce même poinçon.
1. Phase élastique et limite d’élasticité
Partant d’un état initial
)( 00 t
naturel
0
0
, on fait progressivement croître la
rotation
du poinçon. La solution en déplacements est recherchée sous la forme :
0 ,
2
, 22 zyx yx
l
xy
l
(7)
où
est pour l’instant une constante à déterminer, le champ (7) étant alors bien cinématiquement
admissible, tandis que le champ de déformation s’écrit :
yyxx eeeey
l
(8)
Le champ de contrainte associé en tout point au champ (8) par la loi de comportement
élastique vaut alors :
yyxx eeeey
l
y
l
21)1(
(9)
Le champ de contrainte (9) vérifie bien l’équation d’équilibre en l’absence de forces de
volume, ainsi que les conditions aux limites en contrainte sur les sections extrémités. La
condition aux limites de surface libre de contraite sur les faces horizontales de la plaque s’écrit :
0)(2)1()()).(( yy
deh
l
ehyT
(10)

3
permettant ainsi de déterminer la valeur de la constante
:
12
(11)
La solution élastique du problème en déplacement et en contrainte s’écrit finalement :
zzxx
yx
eeee
lyE
eyx
l
exy
l
2
22
1
12
(12)
où l’on utilisé les relations classiques :
)1(
2et
)21)(1(
EE
(13)
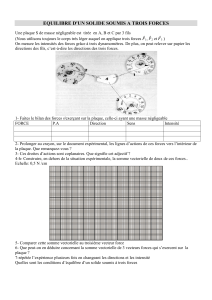
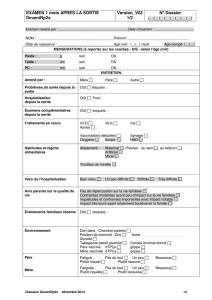
Le profil (linéaire) des contraintes
xx dans l’épaisseur de la plaque est représenté sur la figure
2(a). Le moment fléchissant correspondant vaut alors :
D
l
Eh
yyM h
h
xx
)1(32
d 2
3
(14)
où
)1(32
2
3
Eh
D
désigne le module de rigidité en flexion de la plaque et
l sa déformation de
courbure.
Cette phase élastique est valable tant que le champ de contrainte (12) vérifie en tout point le
critère de plasticité de Tresca (1), soit en tenant compte du fait qu’en tout point la contrainte
yy
est contrainte principale intermédiaire :
hhyCy
l
E
CCf xxyyxxIIII
, 2
)1(
soit 022)( 2
0
(15)
c’est-à-dire tant que
C
l
Eh 2
)1( 2
ou encore compte tenu de (14) :
3
42
Ch
MM e
(16)

4
Cette valeur du moment de flexion représente la limite d’élasticité initiale du système. Elle
correspond à la plastification en compression des points situés sur la face supérieure (y=+h) et en
traction de ceux situés sur la face inférieure (y=-h) : figure 2(b).
xx
hy
hy
e
MM
)(a
xx
e
MM
C2
C2
)(b
xx
le MMM
zone
élastique
zones
plastiques
e2
)(c
xx
l
MM
)(d
xx
hy
hy
e
MM
)(a
xx
e
MM
C2
C2
)(b
xx
le MMM
zone
élastique
zones
plastiques
e2
)(c
xx
l
MM
)(d
Figure 2. Diagrammes de contrainte dans les différentes phases d’évolution élastoplastique du
problème de la flexion
2. Phase élastoplastique
Poursuivant le chargement au-delà de la limite d’élasticité initiale du système, c’est-à-dire
faisant croître le paramètre de chargement M au-delà de la valeur
e
M
, on fait l’hypothèse,
vérifiable a posteriori, que le champ de contrainte reste de la forme :
zz
zz
xx
xx eeee
(17)
avec :

5
xxxx
eyhC
eye
e
y
C
hyeC
zz
et
si 2
si 2
si 2
(18)
c’est-à-dire que l’épaisseur de la plaque est subdivisée en trois parties : un «noyau élastique»
d’épaisseur 2e situé entre les plans
ey
, et deux zones plastiques où le matériau a atteint sa
limte d’élasticité en compression
)( hye
et en traction
)( eyh
: voir figure 2(c). Ce
champ est bien statiquement admissible avec les données en efforts du problème, équilibrant la
valeur suivante du paramètre de chargement
3
2d )( 2
2e
hCyyeM h
h
xx
(19)
La valeur du moment de flexion varie entre la limite d’élasticité, correspondant à e=h et une
valeur maximale correspondant à la plastification complète de la section de la poutre (e=0 : figure
2(d)) :
ee MCheMeMheMChM2
3
20)()(
3
422
(20)
3. Solution en zone élastique (
eye
)
Elle correspond simplement à la solution élastique du problème de flexion d’une plaque
d’épaisseur
e2
, donnée par les expressions (12) valables pour
eye
, le critère de
plasticité étant atteint en
ey
. Il vient alors immédiatement en comparant les deux
expressions du champ de contrainte dans cette zone données respectivement par (12) et (18) :
ElC
e
)1(2 2
(21)
L’expression de la loi moment-courbure en phase élastoplastique se calcule alors très
simplement à partir de (19) et (21) ;
2
2
2)1(2
3
1
12)/(
Eh
C
ChlM
(22)
c’est-à-dire encore :
 6
7
8
9
6
7
8
9
1
/
9
100%