0,36 mNm Servomoteurs CC sans balais

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
UN
R
P2 max.
η max.
no
Io
MH
Co
Cv
kn
kE
kM
kI
Δn/ΔM
L
τ m
J
α max.
Rth 1 / Rth 2
τ w1 / τ w2
≤
=
ne max.
Me max.
Ie max.
Volt
Ω
W
%
rpm
A
mNm
mNm
mNm/rpm
rpm/V
mV/rpm
mNm/A
A/mNm
rpm/mNm
µH
ms
gcm2
.103rad/s2
K/W
s
°C
°C
N
N
N
mm
mm
g
rpm
mNm
A
0620 ... B
0,36 mNm
6 12
9,1 59,0
1,47 1,49
52 50
46 500 35 600
0,062 0,020
0,73 0,57
0,023 0,023
1,0
.10-6 1,0
.10-6
8 451 3 282
0,118 0,305
1,13 2,91
0,885 0,344
68 054 66 533
26 187
6 6
0,0095 0,0095
768 601
14 / 88,0
1 / 149
– 20 ... + 100
+125
2,0 / 1,5
0,6 / 0,2
10
0,012
0
2,5
100 000 100 000
0,351 0,356
0,367 0,144
0620 K 006 B 012 B
06/1
PA2-50, HXM3-64
Page 1/2
0,40,2 0,30,1
0
2,51,5
0
20 000
60 000
40 000
80 000
120 000
100 000
0,5
0620K012B
0620K012B (Rth2 -55%)
M [mNm]
n [rpm] Watt
1 2
U
N
Edition 2014
Série
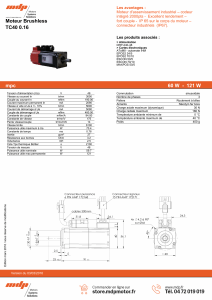
Servomoteurs C.C. sans balais
Tension nominale
Résistance entre phases
Puissance utile 1)
Rendement
Vitesse à vide
Courant à vide (avec l’arbre ø 1,0 mm)
Couple de démarrage
Couple de frottement statique
Coefficient de frottement dynamique
Constante de vitesse
Constante FEM
Constante de couple
Constante de courant
Pente de la courbe n/M
Inductance entre phases
Constante de temps mécanique
Inertie du rotor
Accélération angulaire
Résistances thermiques
Constantes de temps thermiques
Températures d’utilisation
– moteur
– bobine, max. admissible
Paliers de l’arbre
Charge max. sur l’arbre:
– radiale à 10 000/50 000 rpm (3,7 mm de la flasque frontale)
– axiale à 10 000/50 000 rpm (seulement en poussée)
– axiale à l’arrêt (seulement en poussée)
Jeu de l’arbre:
– radial
– axial
Matériau du boîtier
Poids
Sens de rotation
Vitesse jusqu’à 2)
Couple jusqu’à 1) 2)
Courant jusqu’à 1) 2)
1) à 40 000 rpm
2) limite thermique avec un Rth 2 réduit de 55%
roulements à billes précontraints
aluminium, anodisé noir
réversible électroniquement
Combinaisons avec
Réducteurs:
Codeurs
Electroniques de commande:
Contrôleurs de vitesse, Contrôleurs de mouvement
Valeurs recommandées - indépendantes les unes des autres
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Plage de travail recommandée en régime continu
Remarque:
Le diagramme représente la vitesse
maximum par rapport au couple disponible
sur l'arbre de sortie pour une température
ambiante donnée de 22°C.
Le moteur peut délivrer davantage de puis-
sance avec un système de refroidissement
adéquat (par ex. Rth 2 réduction de –55%).
La droite (Un) montre le point de travail à
tension nominale à une température am-
biante de 22°C. Tous les points de travail au
dessus de cette droite exigeront une tension
d'alimentation supérieure. (Tous les points de
travail en dessous de cette droite exigeront
une tension d'alimentation inférieure).
Le couple maximum disponible et la vitesse
seront réduits si la température ambiante
est supérieure à 22°C et/ou si le moteur est
thermiquement isolé de l'environnement.
www.faulhaber.com

N
S
+5V
+5V
+5V
+5V
0620 ... B
1
2
3
4
5
6
7
8
18
Edition 2014
18
18
N
S
+5V
+5V
+5V
+5V
N
S
+5V
+5V
+5V
+5V
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
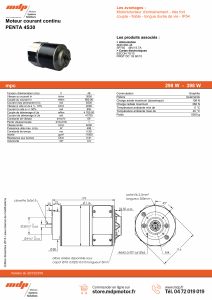
Informations pour câbles et connexions
∆ Bobinage couplé en triangle 3 x 120°
Nr. Fonction
Phase C
Phase B
Capteur Hall C
Alimentation +5V
GND logique
Capteur Hall A
Capteur Hall B
Phase A
Nr. Fonction
Phase C
Phase B
Capteur Hall C
Alimentation +5V
GND logique
Capteur Hall A
Capteur Hall B
Phase A
Connexions
Connexions
Flexboard
matériau PTFE,
8 conducteurs,
grille de base de 0,5 mm
Remarque
Capteurs de Hall digitale
Nombre de paires de pôles = 1
Connecteur
type suggéré: Molex -
Connecteur ZIF,
Nr. 52745-0896
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 2/2
Options
Moteurs avec capteurs de Hall analogiques pour
combinaisons avec Contrôleur de mouvement
Options
Moteurs avec capteurs
de Hall analogiques
pour combinaisons avec
Contrôleur de mouvement
(option nr.: K1855)
Pour que cette option est
nécessaire l'adaptateur
nr.: 6501.0083.
Variantes de Flexboard
pour combinaisons avec
contrôleur de vitesse
(option nr.: K2279)
Variantes de Flexboard
pour combinaisons avec
contrôleur de mouvement
(option nr.: K2280)
Informations pour la commande
Exemples:
0620K006 B
0620K012 B-K2279
Nr. Fonction
Phase C
Phase B
Phase A
GND
+5V
Hallsensor C
Hallsensor B
Hallsensor A
Connexions
A
ø0,07
0,04
A
ø6 ø5 -0,018
M4,5x0,5
0
20 5,15
1,9
16,7
0,4
±0,03
±0,3
±0,5
±0,2
3,35 1,8
0,3
4,5
±0,03
±0,07
±0,3
4
5,5
80 ±1
ø1,0 -0,012
-0,009 ø1,75 -0,05
Aø0,05
0,02
-0,03
DIN 58400
m=0,12
z=12
x=+0,2
1 8
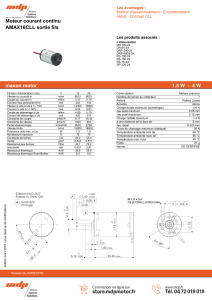
0620 K ... B 0620 C ... B
pour réducteurs 06/1
www.faulhaber.com
1
/
2
100%