COMMANDE DE PANNEAU SOLAIRE A L`AIDE D`UNE CARTE A PIC

ﺔﯿﺒﻌﺸﻟا ﺔﯿطاﺮﻘﻤﯾﺪﻟا ﺔﯾﺮﺋاﺰﺠﻟا ﺔﯾرﻮﮭﻤﺠﻟا
République Algérienne Démocratique et Populaire
Ministère de l’enseignement Supérieur et de la recherche scientifique
Université Mohamed Khider Biskra
Faculté des sciences et de la Technologie
Département de Génie Electrique
Filière : Electronique
Option
:
Communication
Réf:…………
Mémoire de Fin d'Etudes
En vue de Préparation de diplôme:
Ingénieur d'état en électronique
Proposé et dirigé Par:
Présenté par :
OUAFI ABD ELKRIM GUESSOUMI FARID
SAADI AMEL
Promotion : Juin 2010
COMMANDE DE PANNEAU
SOLAIRE A L'AIDE D'UNE CARTE
A PIC

ﺔﯿﺒﻌﺸﻟا ﺔﯿطاﺮﻘﻤﯾﺪﻟا ﺔﯾﺮﺋاﺰﺠﻟا ﺔﯾرﻮﮭﻤﺠﻟا
République Algérienne Démocratique et Populaire
Ministère de l’enseignement Supérieur et de la recherche scientifique
Université Mohamed Khider Biskra
Faculté des sciences et de la Technologie
Département de Génie Electrique
Filière : Electronique
Option
:
Communication
Mémoire de Fin d'Etudes
En vue de Préparation de diplôme:
Ingénieur d'état en électronique
COMMANDE DE PANNEAU SOLAIRE
A L'AIDE D'UNE CARTE A PIC
Présenté par :
GUESSOUMI FARID
SAADI AMEL
Avis favorable du président du Jury
Nom et prénom
Signature
…………………………………… …………………………
…………………………………… …………………………
…………………………………… …………………………
Cachet et signature

Résumé du mémoire de fin d’étude
En vue de Préparation de diplôme:
Ingénieur d'état en électronique
Option :
Communication
COMMANDE DE PANNEAU SOLAIRE A L'AIDE D'UNE
CARTE A PIC
Proposé par :
OUAFI ABD ELKRIM
Dirigé par :
OUAFI ABD ELKRIM
RESUME
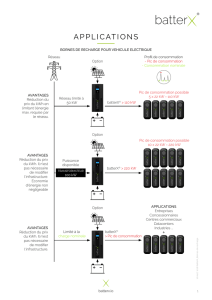
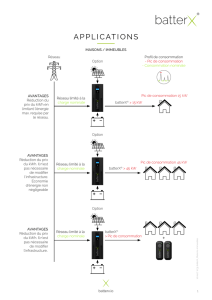
Dans le cas des panneaux solaires fixes, une part importante de l’énergie récupérable est
ainsi perdue. Notre but dans ce travail est d’optimiser l’orientation des panneaux solaires pour
recevoir le maximum d’énergie au cours de la journée. Pour cette raison, on a réalisé un suiveur
solaire.
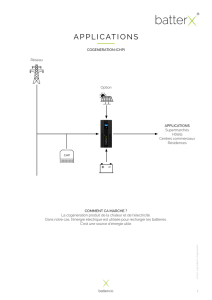
La conception et la réalisation de ce système de commande du suiveur de soleil est basée
sur des capteurs de la lumières, un microcontrôleur pour la commande du circuit et un système
mécanique de poursuite solaire.
ﺺــﺨﻠﻣ
ﺎﻧﻓدھ نﺎﻛ كﻟذﻟ ،ﺎﮭﻧادﻘﻓ مﺗﯾ دادرﺗﺳﻼﻟ ﺔﻠﺑﺎﻘﻟا ﺔﻗﺎطﻟا نﻣ رﯾﺑﻛ ءزﺟ ،ﺔﺗﺑﺎﺛﻟا ﺔﯾﺳﻣﺷﻟا حاوﻟﻷا ﺔﻟﺎﺣ ﻲﻓ
،رﺎﮭﻧﻟا لﻼﺧ ﺔﯾﺳﻣﺷﻟا ﺔﻗﺎطﻟا نﻣ نﻛﻣﻣ ردﻗ ﻰﺻﻗأ ﻰﻠﻋ لوﺻﺣﻠﻟ ﺔﯾﺳﻣﺷﻟا حاوﻟﻷا ﮫﯾﺟوﺗ وھ لﻣﻌﻟا اذھ نﻣ
سﻣﺷﻟا ﺔﻛرﺣ بﻘﻌﺗﻟ مﻛﺣﺗ مﺎظﻧ زﺎﺟﻧﺎﺑ ﺎﻧﻣﻗ كﻟذ لﺟأ نﻣو .
قﯾﻗد ﺞﻟﺎﻌﻣ ،ﺔﯾﺋوﺿ طﻗاوﻟ لﺎﻣﻌﺗﺳﺎﺑ سﻣﺷﻟا ﺔﻛرﺣ ﺔﺑﻗارﻣ ﻰﻠﻋ دﻣﺗﻌﯾ مﺎظﻧﻟا اذھ ذﯾﻔﻧﺗو مﯾﻣﺻﺗ
)84F16 ( ﺔﯾﺳﻣﺷﻟا حاوﻟﻷا كﯾرﺣﺗﻟ ﻲﻛﯾﻧﺎﻛﯾﻣ مﺎظﻧ و ةرادﻟا ﻲﻓ مﻛﺣﺗﻠﻟ.

Remerciement
Nos remerciements vont premièrement à Dieu tout
puissant pour la volonté, la santé, et la patience, qu'il nous a données
durant toutes ces années d'étude.
Nous exprimons nos profondes gratitudes à nos parents
pour leurs encouragements, leur soutien et pour les sacrifices
qu'ils ont enduré.
Ainsi, nous tenons également à exprimer nos vifs remerciements
à notre encadreur Ouafi Abd Elkrim pour avoir d'abord
proposé ce thème, pour suivi continuel tout le long de la
réalisation de
Ce mémoire, et qui n'a pas cessé de nous donner ses
conseils et remarques.
Nos sincères remerciements aux messieurs les membres
de jury pour l'honneur qu'ils nous font en participant au
jugement de ce travail.
Nous tenons à remercier vivement toutes les personnes qui nous
ont aidé à élaborer et réaliser ce mémoire, ainsi à tous ceux qui
nous ont aidé, de prés ou de loin, à accomplir ce travail.
Nos remerciements vont aussi à tous les enseignants du
département d'électronique qui ont contribué à notre
formation
Enfin nous tenons à exprimer notre reconnaissance à tous
nos amis et collègues pour le soutient moral.

Au nom de dieu clément et miséricordieux
Avant tout, je tiens à remercier le bon dieu, et l’unique qui m’offre le courage
et la volonté nécessaire pour affronter les différentes difficultés de la vie,
Je dédie ce modeste travail
A ma mère.
A mon père.
A mes frères et ma sœurs.
A toute ma famille.
A mes amis et mes collègues de la promotion 2010
« Electronique ».
A Tous mes chers amis, tous ceux que j’aime et me sont très chers.
Amel Saadi
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
1
/
111
100%