O3 - Cilas Optique Adaptative

Optique Adaptative 2015-2016 1
Version 2015
Introduction
La résolution obtenue avec de grands télescopes (>8m), même sur les meilleurs sites
(Chili, Hawaï), n'est jamais supérieure à la résolution obtenue avec un télescope de 30 cm de
diamètre ! Le responsable de cette dégradation de la qualité des images astronomiques est la
turbulence atmosphérique. Le rêve des astrophysiciens est de se débarrasser de l’effet de cette
turbulence sur les images astronomiques. L'optique adaptative transforme ce rêve en réalité en
compensant en temps réel les dégradations induites par la turbulence atmosphérique sur le front
d’onde. Le principe est fort simple : analyser le défaut du front d'onde provoqué par la
turbulence et le compenser par un miroir déformable. L’objectif de cet asservissement est
d’obtenir un instrument d’optique idéal, c'est-à-dire limité par la diffraction.
L'optique adaptative (ou optique active pour les corrections basses fréquences) n'est déjà plus
réservée au seul domaine de l'astrophysique. Cette technique se répand rapidement à tous les
domaines de l'optique instrumentale (optique ophtalmique, compensation de dérive thermique,
remise en forme de faisceaux laser, autofocalisation, etc.).
Q0- Pourquoi faire de la correction de surface d’onde :
Calculer la résolution angulaire idéale (limite liée à la diffraction) pour un grand
télescope de 8 m de diamètre de pupille d’entrée, pour une source de longueur d’onde
m, en microradians et en secondes d’arc.
En pratique sur un très bon site astronomique, le paramètre de Fried, r0, est de l’ordre de 30 cm.
Rechercher ou rappeler comment est défini le paramètre de Fried et calculer la
résolution correspondant à un paramètre de Fried de 30 cm en microradians et en secondes
d’arc. Par combien est divisée la résolution idéale compte tenu des perturbations de
l’atmosphère ?
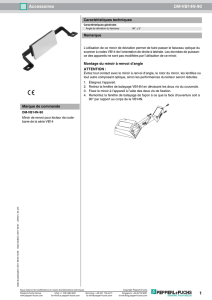
Le système d'optique adaptative que vous allez étudier au cours de ce TP est constitué :
pour l'analyse de front d'onde de type Shack-Hartmann : d’une matrice de microlentilles
(5×5) et d’une matrice CCD
pour la compensation des défauts : d’un miroir déformable à 13 actionneurs.
Après une étude séparée de ces deux éléments, on effectuera un asservissement
multivariable (42 mesures d'analyse du front d'onde, 13 commandes du miroir) pour corriger en
temps réel les défauts du front d’onde.

Optique Adaptative 2015-2016 2
Etude du Miroir déformable
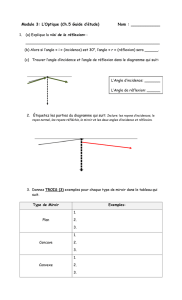
Le miroir déformable est un miroir « bimorphe », fabriqué par la société CILAS. Il est
constitué de 13 actionneurs dont 7 dans la pupille et 6 hors pupille. La pupille du miroir a un
diamètre de 30 mm.
Chaque actionneur est constitué de deux couches piézo-électriques collées. Sur chaque couche
on applique un champ électrique égal en module, mais de sens opposé : on obtient alors une
courbure du miroir par effet bilame dans la zone délimitée par l’actionneur.
EE
V
courbure
obtenue
Chaque actionneur est piloté entre -400 et +400 volts par un amplificateur haute tension.
La bande passante de cet amplificateur est limitée à une fréquence de 200 Hz (valeur très
inférieure aux fréquences de résonance du miroir). Chaque voie d’entrée de l’amplificateur est
commandée entre -10V et +10 V par la sortie d’une carte de conversion numérique-analogique
12 bits (-10 V correspond au niveau binaire 0 et +10 V au niveau 4095).
Le laser Hélium Néon permet de visualiser les franges entre le miroir de référence (à /20) et le
miroir déformable qui forment un Michelson.
Attention : ne dérégler ni le laser et son épuration,
ni le miroir escamotable et ni le premier Clairaut.
Étoile fictive
(trou source)
lase
r
Filtre
Miroir
déformable
Système afocal
et relais pupillaire
Analyseur
de front d’onde
Shack-Hartmann
miroir de référence
Turbulence
CCD
C
C
D
Voie imagerie

Optique Adaptative 2015-2016 3
Placer devant le laser le petit miroir escamotable.
Observer les franges d'interférence projetées sur le mur à l’aide d’une lame semi-
transparente placée en sortie de l’interféromètre de Michelson.
Régler l’orientation du miroir de référence pour obtenir une teinte plate la plus grande
possible.
Q1 : Quel est le défaut (amplitude, forme, type d’aberration) du miroir déformable lorsque les
tensions appliquées aux actionneurs sont toutes nulles ? Ce défaut est-il gênant ?
Estimer sa planéité en unité de longueur d’onde du laser.
Mettre sous tension l'alimentation du miroir déformable et lancer le logiciel « miroir » à
partir de c:\. Ce logiciel permet de piloter le miroir déformable : entrer pour chaque actionneur
une tension entre -9,9 et +9,9 V (-400 et + 400 V sur les actionneurs) (cliquer sur la valeur à
modifier, entrer la nouvelle valeur et valider) et appliquer les valeurs choisies (bouton
"appliquer"). Les actionneurs sont remis à zéro par le bouton "R.A.Z." et "appliquer".
Q2 : Observer et dessiner les déformations obtenues pour les différents actionneurs. En déduire
les formes, les amplitudes ou les pentes de défauts de front d’onde.
Q3 : Quel type de défaut de front d’onde obtient-on si on applique la même tension sur tous les
actionneurs ? Expliquer.
Q4 : Quel type de vecteur de tensions doit-on appliquer pour obtenir un tilt ? Quel tilt
maximum peut-on obtenir ?
Q5 : Quelle déformation obtient-on si on applique la même tension (5V) sur tous les
actionneurs périphériques (7, 8, 9, 10, 11 et 12) ?
Charger quelques fichiers de vecteurs de tensions obtenues à l'aide du Zygo : « abspher,
defoc6.1, coma, astig4.4 ». Bouton "load", entrer le nom du fichier, valider et appliquer.
Q6 : Les déformations obtenues correspondent-elle bien aux aberrations du 3° ordre d’un
système optique ? Quelle est leur amplitude ?
Quitter le logiciel après avoir remis tous les actionneurs à zéro.
Mettre la sécurité du laser (loquet à la sortie).
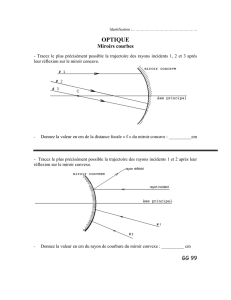
Rôle et réglage du système afocal – relais pupillaire
Le diamètre du miroir déformable est 30 mm et la dimension de la matrice CCD est 4 mm
de côté.
Le système afocal est constitué de 3 lentilles : 2 lentilles convergentes (300 et 35 mm) et
une lentille divergente (-5mm) placée au foyer commun.
Ce système doit conjuguer en dimension et en position le miroir déformable et l’analyseur
de front d’onde (raison pour laquelle il est appelé, ici, relais pupillaire).
Q7 : Faire les 2 schémas de principe du système afocal, en l’absence de la lentille divergente et
en présence de la lentille divergente. Bien dessiner les rayons qui montrent la conjugaison
pupillaire entre le miroir déformable et l’analyseur dans les 2 cas (avec et sans lentille
divergente).

Optique Adaptative 2015-2016 4
Q8 : Expliquer pourquoi cette conjugaison pupillaire est nécessaire. Dans le cas contraire, que
se passe-t-il si l’on applique un tilt important au miroir déformable ? Utiliser les schémas
précédents pour répondre clairement à cette question.
Estimer la distance miroir déformable – 1ère lentille du système afocal.
Q9 : Calculer la taille de l'image, par l’ensemble du système afocal, du miroir déformable et sa
position dans les 2 cas (avec ou sans lentille divergente).
Mettre sous tension l'alimentation de la caméra et lancer le logiciel "adaptica".
Il faut avant tout charger un fichier de configuration de la carte vidéo IC-PCI.
→ Attention BUG : ne vous trompez pas sur les opérations de la ligne suivante et
n’ouvrez plus jamais le menu file.
Menu File, sous menu Open : Cliquer sur le nom du fichier OLI1626.CNF, puis cliquer OK.
Observer ensuite l'image en continu. Menu image, sous menu Continu
→ Attention 2ème BUG : l'image n'apparaît pas. Appuyer une touche et ouvrir à nouveau
"image", "continu". L’image apparaît !
Cacher le miroir de référence.
Placer correctement la caméra. On doit observer la pupille centrée sur le quadrillage
rouge. Replacer les microlentilles.
Régler la focalisation et la position des taches à l'aide des vis micrométriques
différentielles (fragiles ! Ne pas forcer !) en déplaçant la matrice de microlentilles (les taches
doivent toutes être à peu près au centre de chaque carré).
Régler la position transversale de la lentille divergente pour que toutes les sous pupilles
des microlentilles soient à peu près uniformément éclairées.
Etude de l'analyseur de front d'onde
On a attribué à chaque microlentille un carré de 43 pixels de côté de la matrice CCD. La
dimension du pixel est 16 par 16 microns. Pour que la mesure du front d’onde soit correcte, les
taches images doivent rester à l’intérieur des carrés rouges.
La distance focale des microlentilles est 70 mm. Chaque microlentille a une pupille carrée de
0,68 mm de côté.
Les coordonnées Gx et Gy du barycentre de la tache image pour chacune des
microlentilles permettent de mesurer, au premier ordre, les pentes du front d'onde x, y.
Q10 : Expliquer pourquoi il est nécessaire de réaliser un seuillage de l'image obtenue sur la
matrice CCD (mettre à zéro les niveaux inférieurs à un certain seuil) avant d'effectuer les
calculs de barycentres
Le seuil se règle par le menu « paramètres » : entrer une valeur de l’ordre de 15.
Q11 : Quelle est la dimension de la tache image (la réponse percussionnelle ou impulsionnelle)
donnée par une microlentille?
Q12 : Quelle est au 1er ordre la relation simple entre x, y et Gx, Gy ?

Optique Adaptative 2015-2016 5
Q13 : Quelle est approximativement la pente maximale mesurable ? Calculer le défaut du front
d'onde correspondant (valeur de crête à creux en unités de ) sur toute la pupille. Comparer
cette dynamique avec la dynamique du miroir déformable.
Q14 : Si l'on suppose que la précision sur la position du barycentre est égale à 0,1 pixel, quel
est le défaut minimum de pente mesurable avec cet analyseur ?
Cacher le miroir déformable et observer le miroir de référence.
Le miroir de référence est un miroir de bonne qualité (/20). Le logiciel permet de
calculer les positions des barycentres correspondant à ce miroir. Ces positions sont ensuite
sauvegardées comme positions de référence. Menu Initialisation, Sous menu Référence.
Quand on ouvre cette fenêtre pour la première fois, les positions sont calculées par rapport au
coin haut, à gauche des carrés.
Lorsque l'on referme cette fenêtre (Bouton OK), les positions calculées sont gardées en
mémoire comme nouvelles références. Quand on ouvre à nouveau cette fenêtre, les positions
sont calculées par rapport à ces positions de référence.
Vérifier que les valeurs sont alors très faibles : de l'ordre du dixième de pixel.
Si les variations sont plus importantes, fermer cette fenêtre, vérifier la qualité de l'image du Shack-Hartmann
(niveau trop faible ou saturation : le niveau 255 est affiché en rouge), augmenter le niveau du seuil sur l'image et
enregistrer (menu Parametres, sous menu seuil de calcul des barycentres) à nouveau les références.
Cacher le miroir de référence et observer le miroir déformable.
Le logiciel permet d’appliquer des tensions sur les actionneurs et de visualiser le
déplacement des barycentres (Menu Initialisation, Sous menu Bary+Action).
Appliquer des tensions sur les actionneurs et observer les déplacements des barycentres.
Observer simultanément l’effet sur l’image du trou source grâce à la caméra CCD sur la voie
imagerie.
Q15 : Les déplacements des barycentres sont-ils conformes à la déformation attendue du
miroir ?
Construction de la matrice d'interaction IM
Le but de cette étape de calibration (apprentissage) est de connaître les tensions à
appliquer au miroir pour compenser les déplacements des barycentres. Pour cela, on procède de
façon inverse : on applique des tensions connues sur chaque actionneur, puis on calcule et on
mémorise dans une matrice les déplacements barycentriques obtenus.
Plus précisément, pour l’étalonnage, on applique une tension de +100V (2,5V en sortie de la
carte C.N.A.) sur l’actionneur, j, et on mémorise dans un vecteur de 42 lignes la position des
barycentres (Gx et Gy pour les 21 sous pupilles). Ensuite on applique une tension de -100V et
on mémorise dans un deuxième vecteur le déplacement des barycentres. Enfin, la colonne, j, de
la matrice Action est obtenue par différence des deux vecteurs divisé par 1024, de façon à
ramener les termes de la matrice pour un niveau de la carte numérique analogique (V = 5 V
correspond à niveaux = 1024). On répète cette opération une dizaine de fois de façon à
moyenner la position des barycentres.
A la fin de la phase de calibration, on obtient donc une matrice de 42 lignes par 13 colonnes,
appelée matrice d’interaction IM, qui correspond aux déplacements des barycentres en fonction
des tensions appliquées aux actionneurs. Il ne restera plus qu’à inverser cette matrice.
 6
7
8
6
7
8
1
/
8
100%